 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Commonsense Graph for Object Localisation in Partial Scenes
Paper and Code
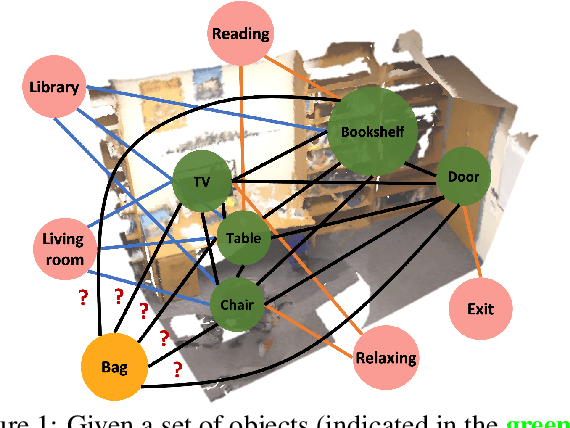
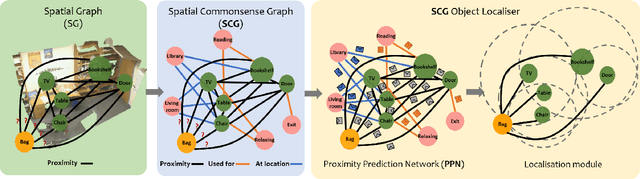
We solve object localisation in partial scenes, a new problem of estimating the unknown position of an object (e.g. where is the bag?) given a partial 3D scan of a scene. The proposed solution is based on a novel scene graph model, the Spatial Commonsense Graph (SCG), where objects are the nodes and edges define pairwise distances between them, enriched by concept nodes and relationships from a commonsense knowledge base. This allows SCG to better generalise its spatial inference over unknown 3D scenes. The SCG is used to estimate the unknown position of the target object in two steps: first, we feed the SCG into a novel Proximity Prediction Network, a graph neural network that uses attention to perform distance prediction between the node representing the target object and the nodes representing the observed objects in the SCG; second, we propose a Localisation Module based on circular intersection to estimate the object position using all the predicted pairwise distances in order to be independent of any reference system. We create a new dataset of partially reconstructed scenes to benchmark our method and baselines for object localisation in partial scenes, where our proposed method achieves the best localisation performance.