 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Attention Point Network for Deep-learning-based Robust Autonomous Robot Motion Generation
Paper and Code
Mar 02, 2021
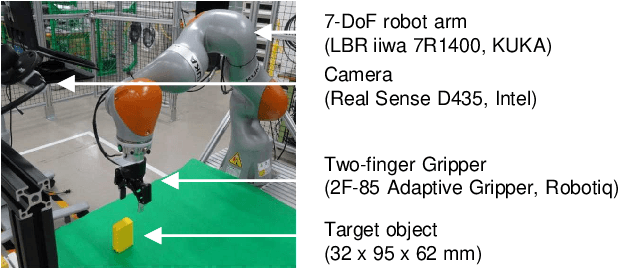
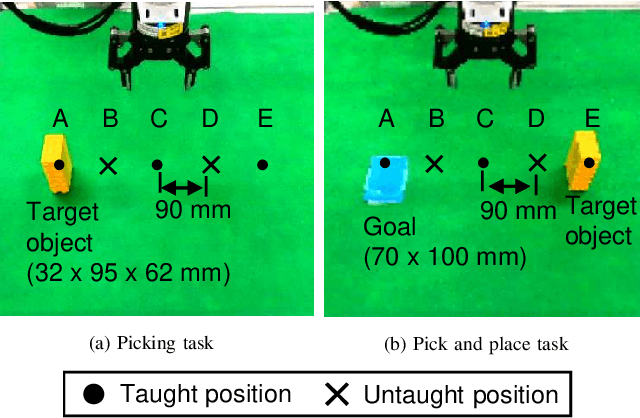
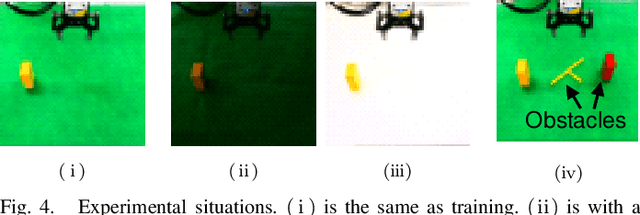
Deep learning provides a powerful framework for automated acquisition of complex robotic motions. However, despite a certain degree of generalization, the need for vast amounts of training data depending on the work-object position is an obstacle to industrial applications. Therefore, a robot motion-generation model that can respond to a variety of work-object positions with a small amount of training data is necessary. In this paper, we propose a method robust to changes in object position by automatically extracting spatial attention points in the image for the robot task and generating motions on the basis of their positions. We demonstrate our method with an LBR iiwa 7R1400 robot arm on a picking task and a pick-and-place task at various positions in various situations. In each task, the spatial attention points are obtained for the work objects that are important to the task. Our method is robust to changes in object position. Further, it is robust to changes in background, lighting, and obstacles that are not important to the task because it only focuses on positions that are important to the task.