 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Recovery from Nonlinear Measurements with Applications in Bad Data Detection for Power Networks
Paper and Code
Jan 05, 2013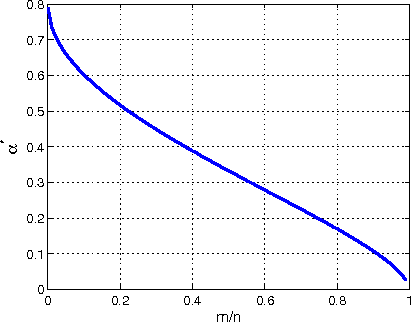
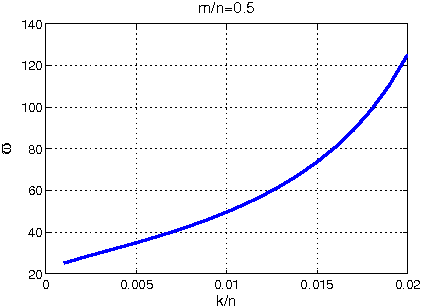
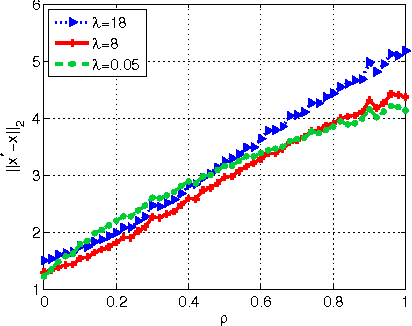
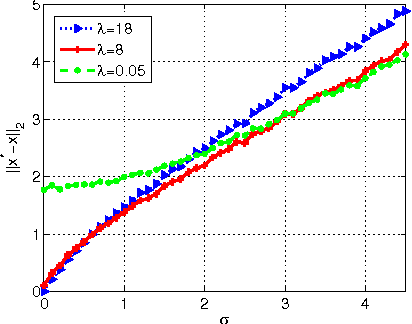
In this paper, we consider the problem of sparse recovery from nonlinear measurements, which has applications in state estimation and bad data detection for power networks. An iterative mixed $\ell_1$ and $\ell_2$ convex program is used to estimate the true state by locally linearizing the nonlinear measurements. When the measurements are linear, through using the almost Euclidean property for a linear subspace, we derive a new performance bound for the state estimation error under sparse bad data and additive observation noise. As a byproduct, in this paper we provide sharp bounds on the almost Euclidean property of a linear subspace, using the "escape-through-the-mesh" theorem from geometric functional analysis. When the measurements are nonlinear, we give conditions under which the solution of the iterative algorithm converges to the true state even though the locally linearized measurements may not be the actual nonlinear measurements. We numerically evaluate our iterative convex programming approach to perform bad data detections in nonlinear electrical power networks problems. We are able to use semidefinite programming to verify the conditions for convergence of the proposed iterative sparse recovery algorithms from nonlinear measurements.