 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoftGroup++: Scalable 3D Instance Segmentation with Octree Pyramid Grouping
Paper and Code
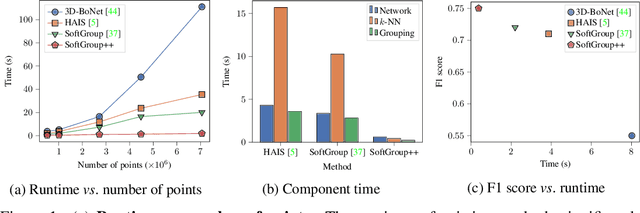
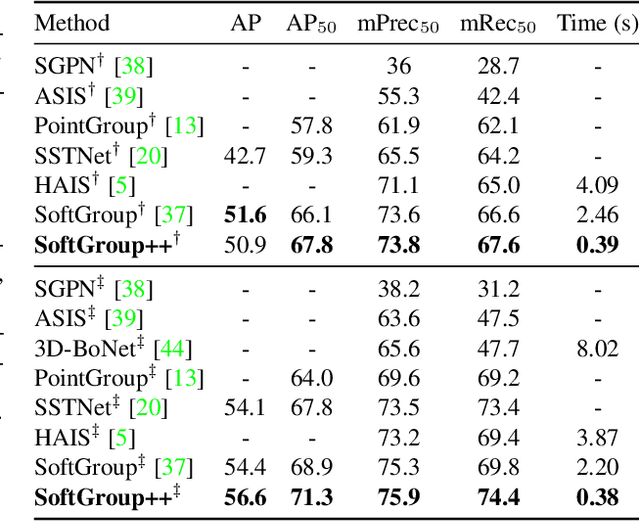
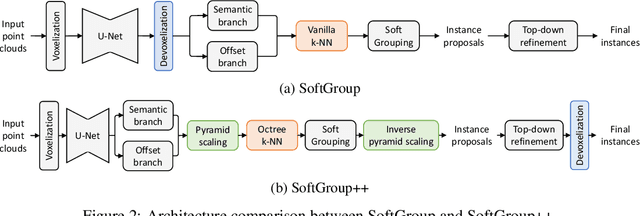
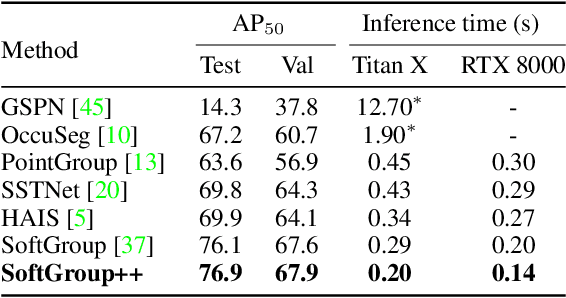
Existing state-of-the-art 3D point cloud instance segmentation methods rely on a grouping-based approach that groups points to obtain object instances. Despite improvement in producing accurate segmentation results, these methods lack scalability and commonly require dividing large input into multiple parts. To process a scene with millions of points, the existing fastest method SoftGroup \cite{vu2022softgroup} requires tens of seconds, which is under satisfaction. Our finding is that $k$-Nearest Neighbor ($k$-NN), which serves as the prerequisite of grouping, is a computational bottleneck. This bottleneck severely worsens the inference time in the scene with a large number of points. This paper proposes SoftGroup++ to address this computational bottleneck and further optimize the inference speed of the whole network. SoftGroup++ is built upon SoftGroup, which differs in three important aspects: (1) performs octree $k$-NN instead of vanilla $k$-NN to reduce time complexity from $\mathcal{O}(n^2)$ to $\mathcal{O}(n \log n)$, (2) performs pyramid scaling that adaptively downsamples backbone outputs to reduce search space for $k$-NN and grouping, and (3) performs late devoxelization that delays the conversion from voxels to points towards the end of the model such that intermediate components operate at a low computational cost. Extensive experiments on various indoor and outdoor datasets demonstrate the efficacy of the proposed SoftGroup++. Notably, SoftGroup++ processes large scenes of millions of points by a single forward without dividing the input into multiple parts, thus enriching contextual information. Especially, SoftGroup++ achieves 2.4 points AP$_{50}$ improvement while nearly $6\times$ faster than the existing fastest method on S3DIS dataset. The code and trained models will be made publicly available.