 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkill Transfer for Temporally-Extended Task Specifications
Paper and Code
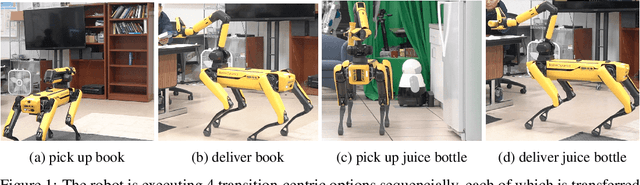
Deploying robots in real-world domains, such as households and flexible manufacturing lines, requires the robots to be taskable on demand. Linear temporal logic (LTL) is a widely-used specification language with a compositional grammar that naturally induces commonalities across tasks. However, the majority of prior research on reinforcement learning with LTL specifications treats every new formula independently. We propose LTL-Transfer, a novel algorithm that enables subpolicy reuse across tasks by segmenting policies for training tasks into portable transition-centric skills capable of satisfying a wide array of unseen LTL specifications while respecting safety-critical constraints. Our experiments in a Minecraft-inspired domain demonstrate the capability of LTL-Transfer to satisfy over 90% of 500 unseen tasks while training on only 50 task specifications and never violating a safety constraint. We also deployed LTL-Transfer on a quadruped mobile manipulator in a household environment to show its ability to transfer to many fetch and delivery tasks in a zero-shot fashion.