 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple Physical Adversarial Examples against End-to-End Autonomous Driving Models
Paper and Code
Mar 12, 2019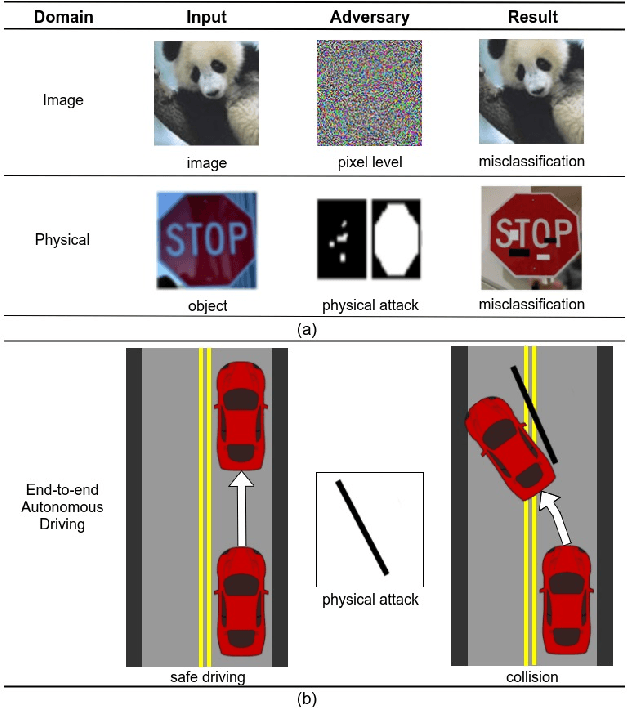
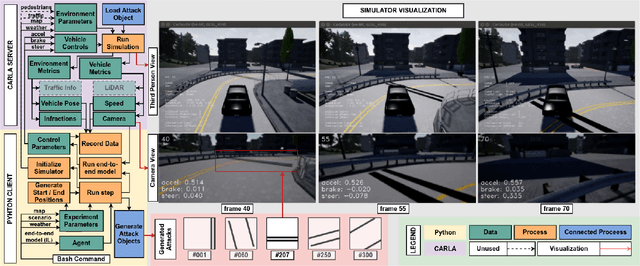
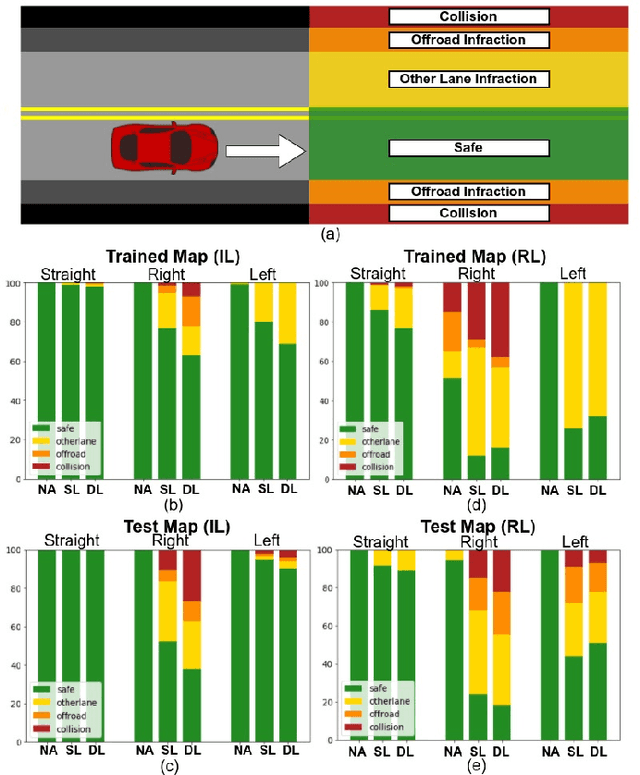
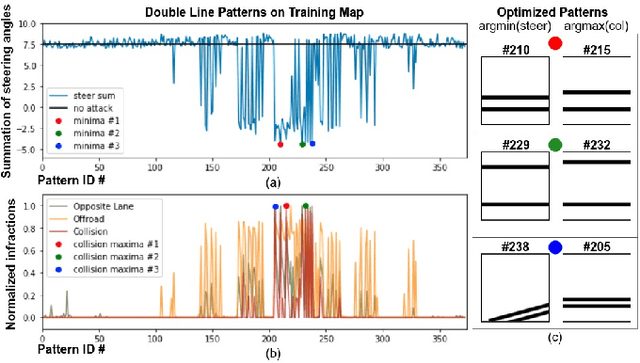
Recent advances in machine learning, especially techniques such as deep neural networks, are promoting a range of high-stakes applications, including autonomous driving, which often relies on deep learning for perception. While deep learning for perception has been shown to be vulnerable to a host of subtle adversarial manipulations of images, end-to-end demonstrations of successful attacks, which manipulate the physical environment and result in physical consequences, are scarce. Moreover, attacks typically involve carefully constructed adversarial examples at the level of pixels. We demonstrate the first end-to-end attacks on autonomous driving in simulation, using simple physically realizable attacks: the painting of black lines on the road. These attacks target deep neural network models for end-to-end autonomous driving control. A systematic investigation shows that such attacks are surprisingly easy to engineer, and we describe scenarios (e.g., right turns) in which they are highly effective, and others that are less vulnerable (e.g., driving straight). Further, we use network deconvolution to demonstrate that the attacks succeed by inducing activation patterns similar to entirely different scenarios used in training.