Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple Online and Realtime Tracking
Paper and Code
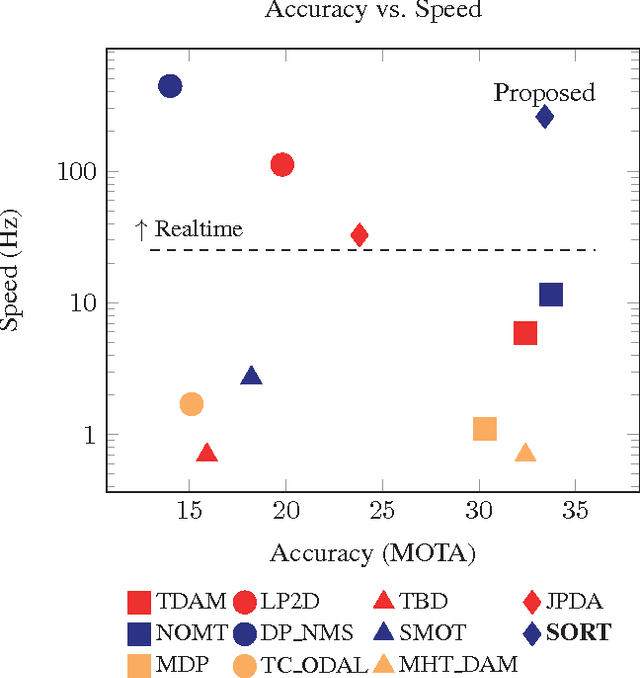
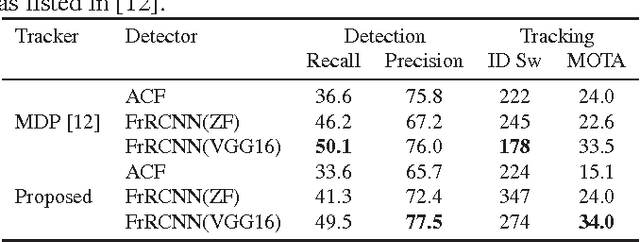
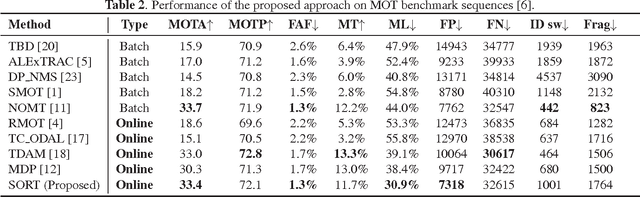
This paper explores a pragmatic approach to multiple object tracking where the main focus is to associate objects efficiently for online and realtime applications. To this end, detection quality is identified as a key factor influencing tracking performance, where changing the detector can improve tracking by up to 18.9%. Despite only using a rudimentary combination of familiar techniques such as the Kalman Filter and Hungarian algorithm for the tracking components, this approach achieves an accuracy comparable to state-of-the-art online trackers. Furthermore, due to the simplicity of our tracking method, the tracker updates at a rate of 260 Hz which is over 20x faster than other state-of-the-art trackers.
* Presented at ICIP 2016, code is available at
https://github.com/abewley/sort
View paper on