 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-is-More: Randomizing HW-NAS with Synthetic Devices
Paper and Code
Apr 01, 2025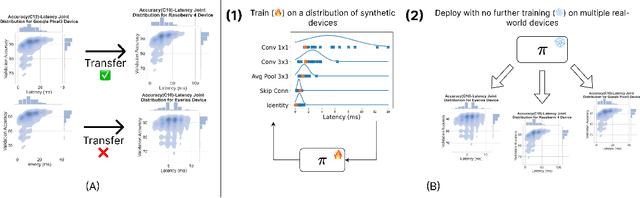
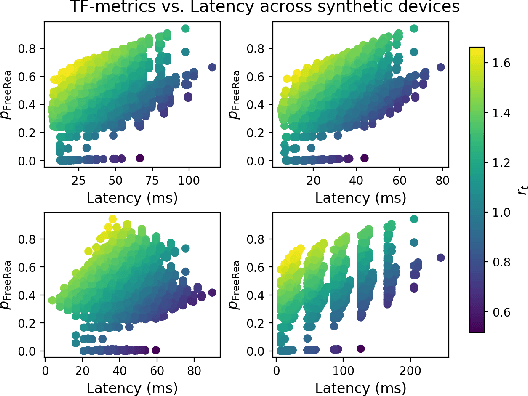
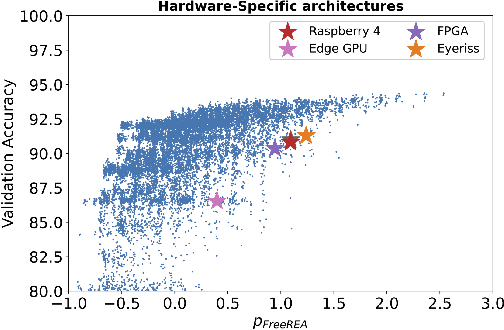
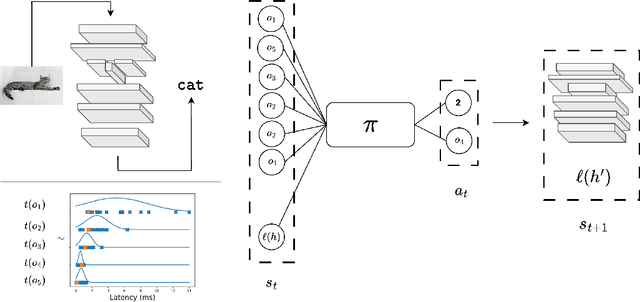
Existing hardware-aware NAS (HW-NAS) methods typically assume access to precise information circa the target device, either via analytical approximations of the post-compilation latency model, or through learned latency predictors. Such approximate approaches risk introducing estimation errors that may prove detrimental in risk-sensitive applications. In this work, we propose a two-stage HW-NAS framework, in which we first learn an architecture controller on a distribution of synthetic devices, and then directly deploy the controller on a target device. At test-time, our network controller deploys directly to the target device without relying on any pre-collected information, and only exploits direct interactions. In particular, the pre-training phase on synthetic devices enables the controller to design an architecture for the target device by interacting with it through a small number of high-fidelity latency measurements. To guarantee accessibility of our method, we only train our controller with training-free accuracy proxies, allowing us to scale the meta-training phase without incurring the overhead of full network training. We benchmark on HW-NATS-Bench, demonstrating that our method generalizes to unseen devices and searches for latency-efficient architectures by in-context adaptation using only a few real-world latency evaluations at test-time.