 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape Completion with Points in the Shadow
Paper and Code
Oct 04, 2022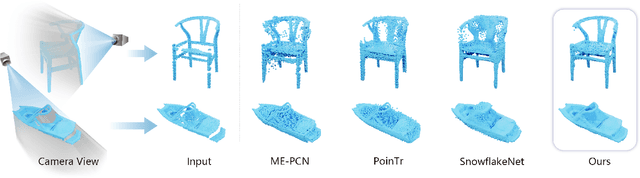



Single-view point cloud completion aims to recover the full geometry of an object based on only limited observation, which is extremely hard due to the data sparsity and occlusion. The core challenge is to generate plausible geometries to fill the unobserved part of the object based on a partial scan, which is under-constrained and suffers from a huge solution space. Inspired by the classic shadow volume technique in computer graphics, we propose a new method to reduce the solution space effectively. Our method considers the camera a light source that casts rays toward the object. Such light rays build a reasonably constrained but sufficiently expressive basis for completion. The completion process is then formulated as a point displacement optimization problem. Points are initialized at the partial scan and then moved to their goal locations with two types of movements for each point: directional movements along the light rays and constrained local movement for shape refinement. We design neural networks to predict the ideal point movements to get the completion results. We demonstrate that our method is accurate, robust, and generalizable through exhaustive evaluation and comparison. Moreover, it outperforms state-of-the-art methods qualitatively and quantitatively on MVP datasets.