 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemiparametrical Gaussian Processes Learning of Forward Dynamical Models for Navigating in a Circular Maze
Paper and Code
Sep 18, 2018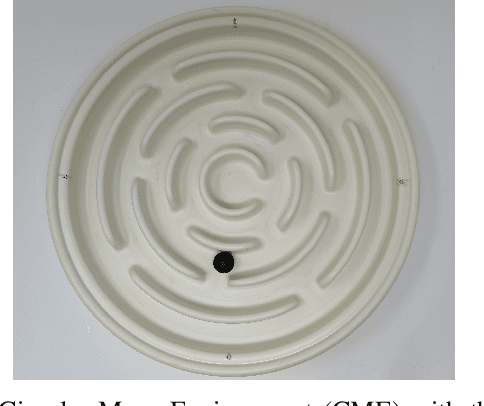
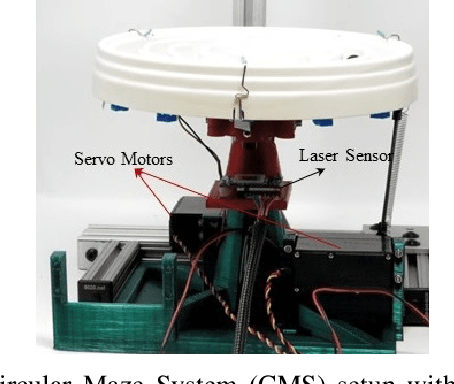
This paper presents a problem of model learning for the purpose of learning how to navigate a ball to a goal state in a circular maze environment with two degrees of freedom. The motion of the ball in the maze environment is influenced by several non-linear effects such as dry friction and contacts, which are difficult to model physically. We propose a semiparametric model to estimate the motion dynamics of the ball based on Gaussian Process Regression equipped with basis functions obtained from physics first principles. The accuracy of this semiparametric model is shown not only in estimation but also in prediction at n-steps ahead and its compared with standard algorithms for model learning. The learned model is then used in a trajectory optimization algorithm to compute ball trajectories. We propose the system presented in the paper as a benchmark problem for reinforcement and robot learning, for its interesting and challenging dynamics and its relative ease of reproducibility.