 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Environment Atlas for Object-Goal Navigation
Paper and Code
Oct 05, 2024
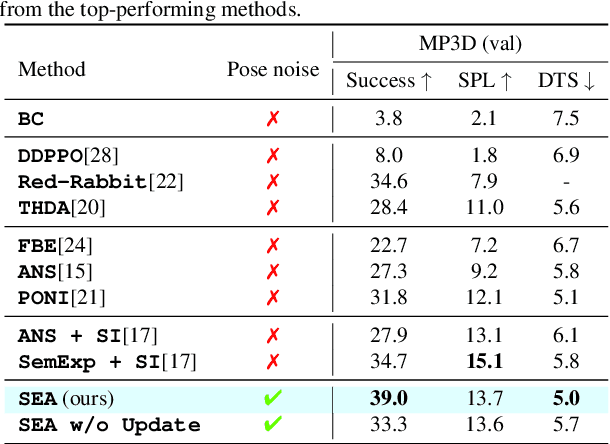
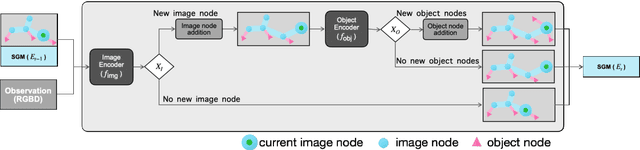
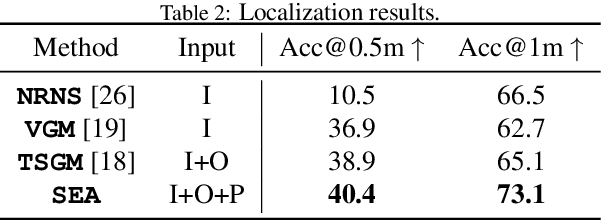
In this paper, we introduce the Semantic Environment Atlas (SEA), a novel mapping approach designed to enhance visual navigation capabilities of embodied agents. The SEA utilizes semantic graph maps that intricately delineate the relationships between places and objects, thereby enriching the navigational context. These maps are constructed from image observations and capture visual landmarks as sparsely encoded nodes within the environment. The SEA integrates multiple semantic maps from various environments, retaining a memory of place-object relationships, which proves invaluable for tasks such as visual localization and navigation. We developed navigation frameworks that effectively leverage the SEA, and we evaluated these frameworks through visual localization and object-goal navigation tasks. Our SEA-based localization framework significantly outperforms existing methods, accurately identifying locations from single query images. Experimental results in Habitat scenarios show that our method not only achieves a success rate of 39.0%, an improvement of 12.4% over the current state-of-the-art, but also maintains robustness under noisy odometry and actuation conditions, all while keeping computational costs low.