 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning of Visual Servoing for Low-Rigidity Robots Considering Temporal Body Changes
Paper and Code
May 20, 2024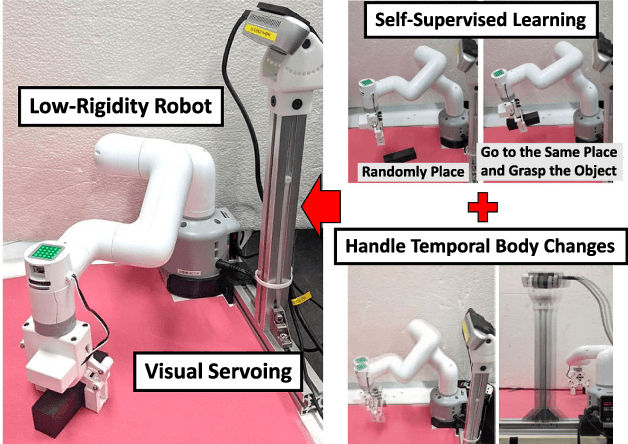
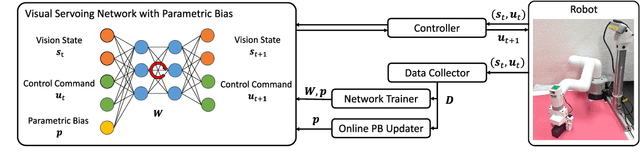
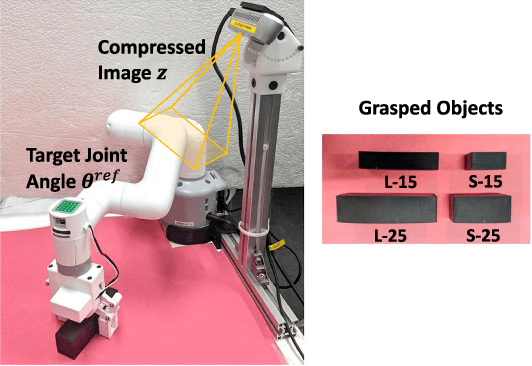
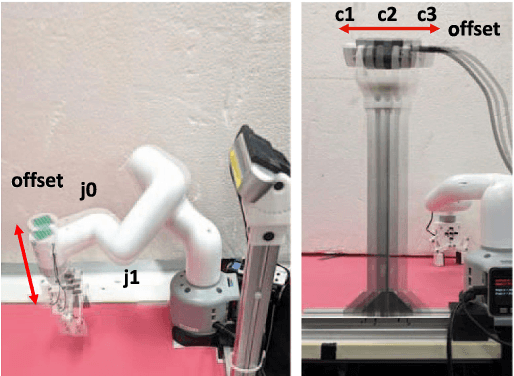
In this study, we investigate object grasping by visual servoing in a low-rigidity robot. It is difficult for a low-rigidity robot to handle its own body as intended compared to a rigid robot, and calibration between vision and body takes some time. In addition, the robot must constantly adapt to changes in its body, such as the change in camera position and change in joints due to aging. Therefore, we develop a method for a low-rigidity robot to autonomously learn visual servoing of its body. We also develop a mechanism that can adaptively change its visual servoing according to temporal body changes. We apply our method to a low-rigidity 6-axis arm, MyCobot, and confirm its effectiveness by conducting object grasping experiments based on visual servoing.