 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised 3D Scene Flow Estimation and Motion Prediction using Local Rigidity Prior
Paper and Code



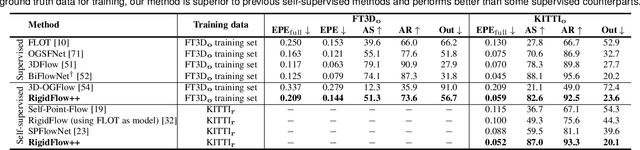
In this article, we investigate self-supervised 3D scene flow estimation and class-agnostic motion prediction on point clouds. A realistic scene can be well modeled as a collection of rigidly moving parts, therefore its scene flow can be represented as a combination of the rigid motion of these individual parts. Building upon this observation, we propose to generate pseudo scene flow labels for self-supervised learning through piecewise rigid motion estimation, in which the source point cloud is decomposed into local regions and each region is treated as rigid. By rigidly aligning each region with its potential counterpart in the target point cloud, we obtain a region-specific rigid transformation to generate its pseudo flow labels. To mitigate the impact of potential outliers on label generation, when solving the rigid registration for each region, we alternately perform three steps: establishing point correspondences, measuring the confidence for the correspondences, and updating the rigid transformation based on the correspondences and their confidence. As a result, confident correspondences will dominate label generation and a validity mask will be derived for the generated pseudo labels. By using the pseudo labels together with their validity mask for supervision, models can be trained in a self-supervised manner. Extensive experiments on FlyingThings3D and KITTI datasets demonstrate that our method achieves new state-of-the-art performance in self-supervised scene flow learning, without any ground truth scene flow for supervision, even performing better than some supervised counterparts. Additionally, our method is further extended to class-agnostic motion prediction and significantly outperforms previous state-of-the-art self-supervised methods on nuScenes dataset.