 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-learning Scene-specific Pedestrian Detectors using a Progressive Latent Model
Paper and Code
Nov 22, 2016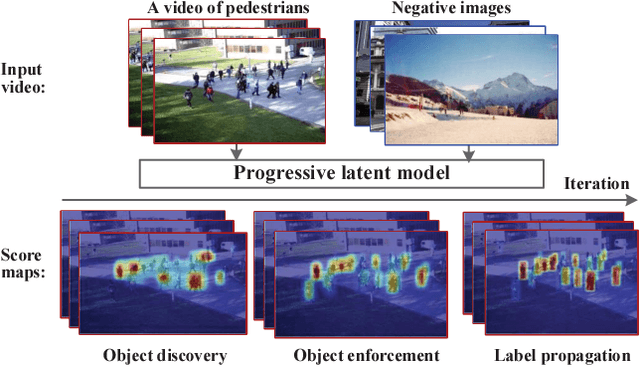
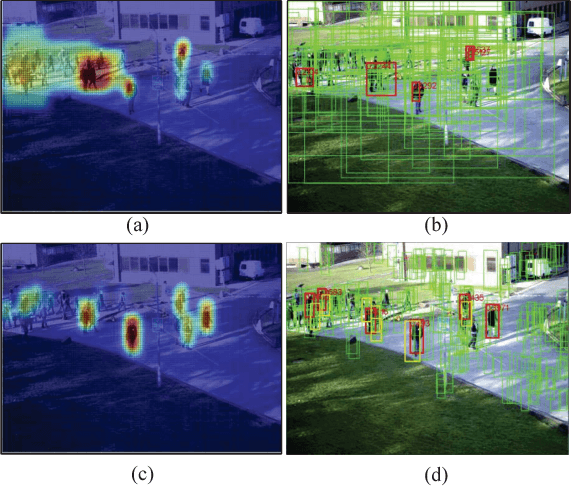
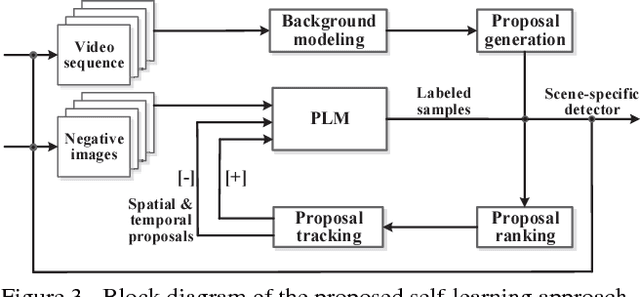
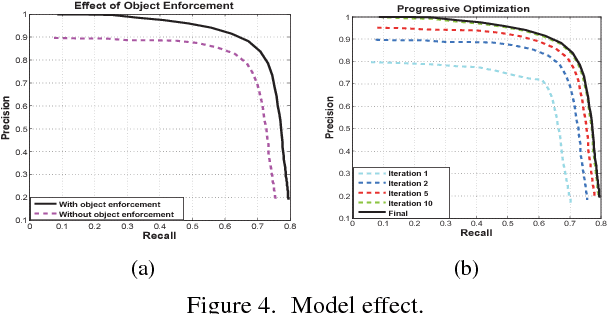
In this paper, a self-learning approach is proposed towards solving scene-specific pedestrian detection problem without any human' annotation involved. The self-learning approach is deployed as progressive steps of object discovery, object enforcement, and label propagation. In the learning procedure, object locations in each frame are treated as latent variables that are solved with a progressive latent model (PLM). Compared with conventional latent models, the proposed PLM incorporates a spatial regularization term to reduce ambiguities in object proposals and to enforce object localization, and also a graph-based label propagation to discover harder instances in adjacent frames. With the difference of convex (DC) objective functions, PLM can be efficiently optimized with a concave-convex programming and thus guaranteeing the stability of self-learning. Extensive experiments demonstrate that even without annotation the proposed self-learning approach outperforms weakly supervised learning approaches, while achieving comparable performance with transfer learning and fully supervised approaches.