 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSE(3)-Equivariant Attention Networks for Shape Reconstruction in Function Space
Paper and Code
Apr 05, 2022
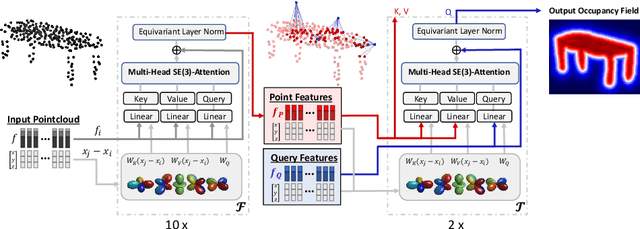
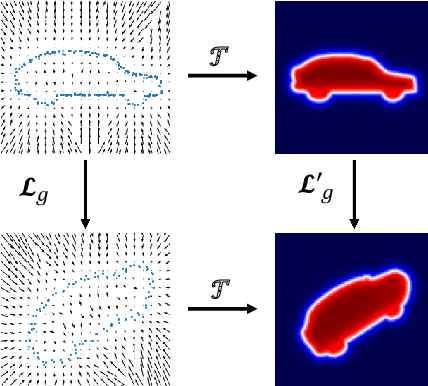
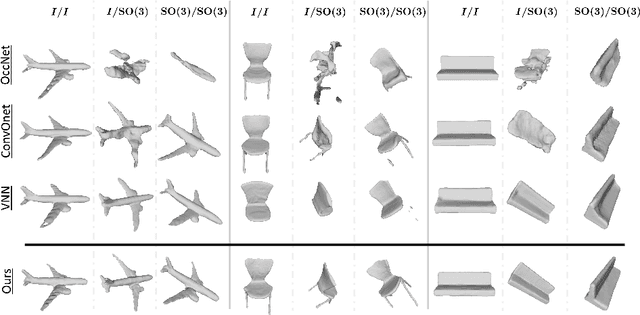
We propose the first SE(3)-equivariant coordinate-based network for learning occupancy fields from point clouds. In contrast to previous shape reconstruction methods that align the input to a regular grid, we operate directly on the irregular, unoriented point cloud. We leverage attention mechanisms in order to preserve the set structure (permutation equivariance and variable length) of the input. At the same time, attention layers enable local shape modelling, a crucial property for scalability to large scenes. In contrast to architectures that create a global signature for the shape, we operate on local tokens. Given an unoriented, sparse, noisy point cloud as input, we produce equivariant features for each point. These serve as keys and values for the subsequent equivariant cross-attention blocks that parametrize the occupancy field. By querying an arbitrary point in space, we predict its occupancy score. We show that our method outperforms previous SO(3)-equivariant methods, as well as non-equivariant methods trained on SO(3)-augmented datasets. More importantly, local modelling together with SE(3)-equivariance create an ideal setting for SE(3) scene reconstruction. We show that by training only on single objects and without any pre-segmentation, we can reconstruct a novel scene with single-object performance.