 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Flow to Action Map: A New Representation for RGB-D based Action Recognition with Convolutional Neural Networks
Paper and Code
Mar 27, 2017
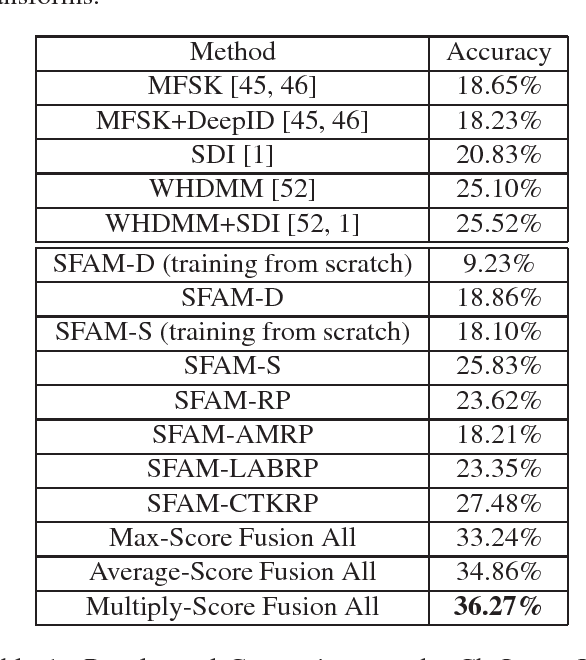

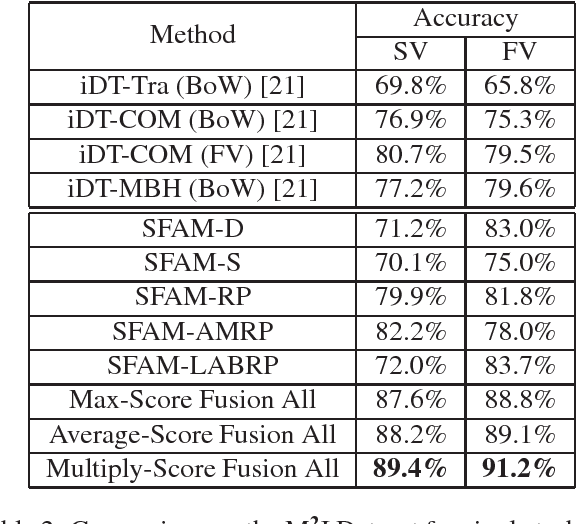
Scene flow describes the motion of 3D objects in real world and potentially could be the basis of a good feature for 3D action recognition. However, its use for action recognition, especially in the context of convolutional neural networks (ConvNets), has not been previously studied. In this paper, we propose the extraction and use of scene flow for action recognition from RGB-D data. Previous works have considered the depth and RGB modalities as separate channels and extract features for later fusion. We take a different approach and consider the modalities as one entity, thus allowing feature extraction for action recognition at the beginning. Two key questions about the use of scene flow for action recognition are addressed: how to organize the scene flow vectors and how to represent the long term dynamics of videos based on scene flow. In order to calculate the scene flow correctly on the available datasets, we propose an effective self-calibration method to align the RGB and depth data spatially without knowledge of the camera parameters. Based on the scene flow vectors, we propose a new representation, namely, Scene Flow to Action Map (SFAM), that describes several long term spatio-temporal dynamics for action recognition. We adopt a channel transform kernel to transform the scene flow vectors to an optimal color space analogous to RGB. This transformation takes better advantage of the trained ConvNets models over ImageNet. Experimental results indicate that this new representation can surpass the performance of state-of-the-art methods on two large public datasets.