 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Task-Driven Robotic Swarm Control via Collision Avoidance and Learning Mean-Field Control
Paper and Code
Sep 15, 2022
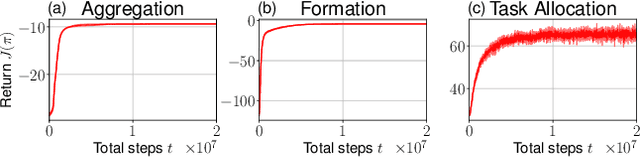

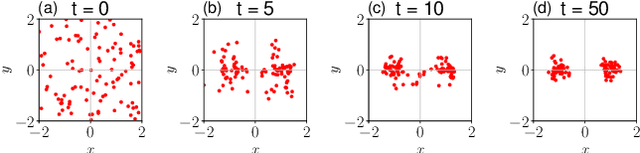
In recent years, reinforcement learning and its multi-agent analogue have achieved great success in solving various complex control problems. However, multi-agent reinforcement learning remains challenging both in its theoretical analysis and empirical design of algorithms, especially for large swarms of embodied robotic agents where a definitive toolchain remains part of active research. We use emerging state-of-the-art mean-field control techniques in order to convert many-agent swarm control into more classical single-agent control of distributions. This allows profiting from advances in single-agent reinforcement learning at the cost of assuming weak interaction between agents. As a result, the mean-field model is violated by the nature of real systems with embodied, physically colliding agents. Here, we combine collision avoidance and learning of mean-field control into a unified framework for tractably designing intelligent robotic swarm behavior. On the theoretical side, we provide novel approximation guarantees for both general mean-field control in continuous spaces and with collision avoidance. On the practical side, we show that our approach outperforms multi-agent reinforcement learning and allows for decentralized open-loop application while avoiding collisions, both in simulation and real UAV swarms. Overall, we propose a framework for the design of swarm behavior that is both mathematically well-founded and practically useful, enabling the solution of otherwise intractable swarm problems.