 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaliency Guided Inter- and Intra-Class Relation Constraints for Weakly Supervised Semantic Segmentation
Paper and Code
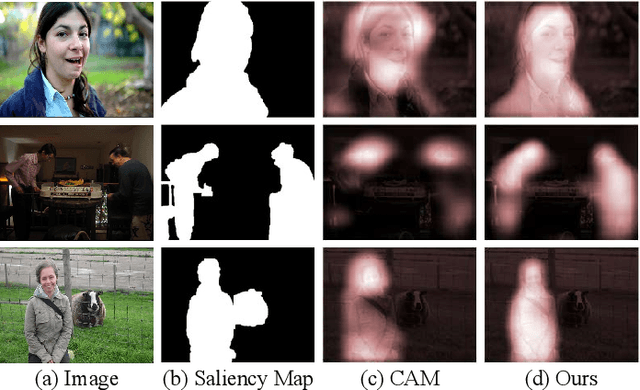
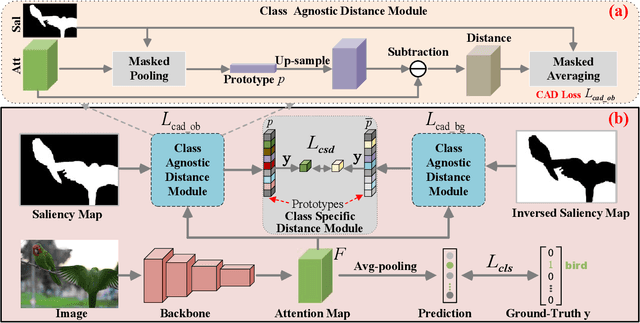
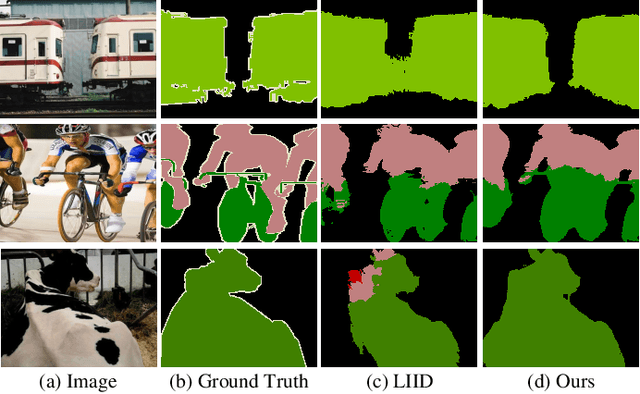
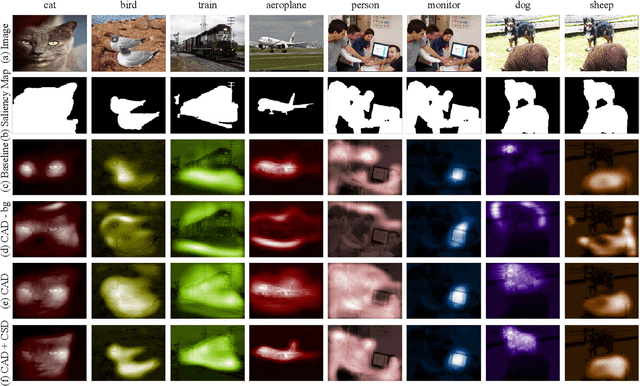
Weakly supervised semantic segmentation with only image-level labels aims to reduce annotation costs for the segmentation task. Existing approaches generally leverage class activation maps (CAMs) to locate the object regions for pseudo label generation. However, CAMs can only discover the most discriminative parts of objects, thus leading to inferior pixel-level pseudo labels. To address this issue, we propose a saliency guided Inter- and Intra-Class Relation Constrained (I$^2$CRC) framework to assist the expansion of the activated object regions in CAMs. Specifically, we propose a saliency guided class-agnostic distance module to pull the intra-category features closer by aligning features to their class prototypes. Further, we propose a class-specific distance module to push the inter-class features apart and encourage the object region to have a higher activation than the background. Besides strengthening the capability of the classification network to activate more integral object regions in CAMs, we also introduce an object guided label refinement module to take a full use of both the segmentation prediction and the initial labels for obtaining superior pseudo-labels. Extensive experiments on PASCAL VOC 2012 and COCO datasets demonstrate well the effectiveness of I$^2$CRC over other state-of-the-art counterparts. The source codes, models, and data have been made available at \url{https://github.com/NUST-Machine-Intelligence-Laboratory/I2CRC}.