 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Embedded Differential Dynamic Programming using Discrete Barrier States
Paper and Code
May 30, 2021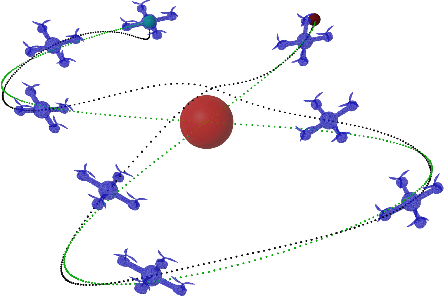
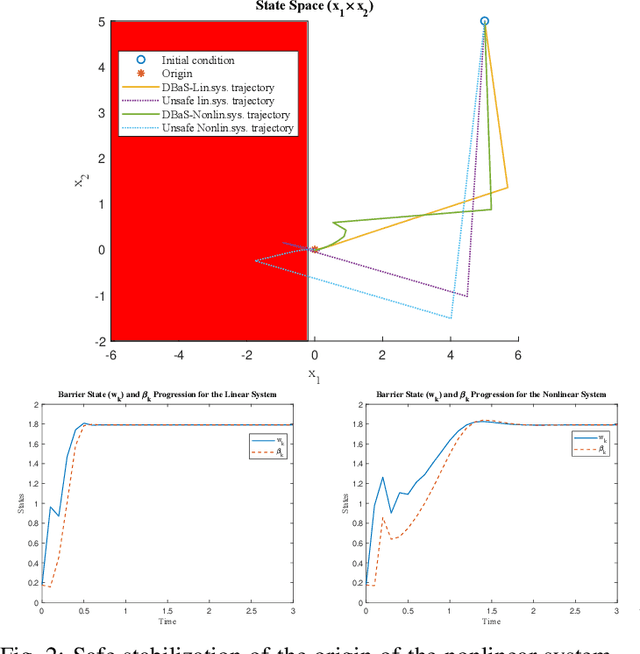
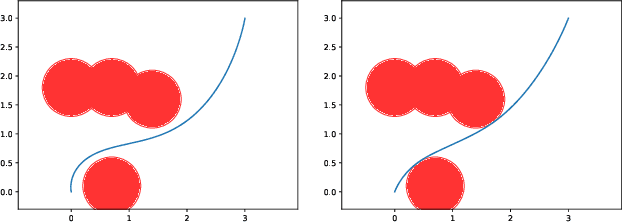
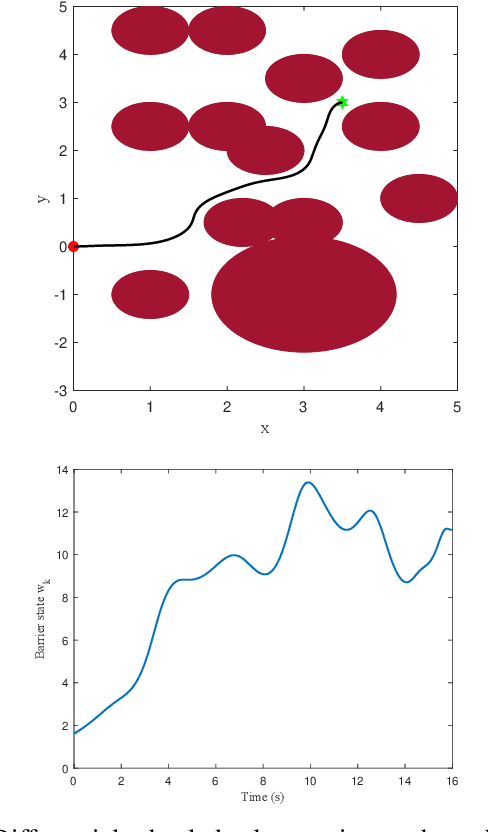
Certified safe control is a growing challenge in robotics, especially when performance and safety objectives are desired to be concurrently achieved. In this work, we extend the barrier state (BaS) concept, recently proposed for stabilization of continuous time systems, to enforce safety for discrete time systems by creating a discrete barrier state (DBaS). The constructed DBaS is embedded into the discrete model of the safety-critical system in order to integrate safety objectives into performance objectives. We subsequently use the proposed technique to implement a safety embedded stabilizing control for nonlinear discrete systems. Furthermore, we employ the DBaS method to develop a safety embedded differential dynamic programming (DDP) technique to plan and execute safe optimal trajectories. The proposed algorithm is leveraged on a differential wheeled robot and on a quadrotor to safely perform several tasks including reaching, tracking and safe multi-quadrotor movement. The DBaS-based DDP (DBaS-DDP) is compared to the penalty method used in constrained DDP problems where it is shown that the DBaS-DDP consistently outperforms the penalty method.