 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Nonlinear Control Using Robust Neural Lyapunov-Barrier Functions
Paper and Code
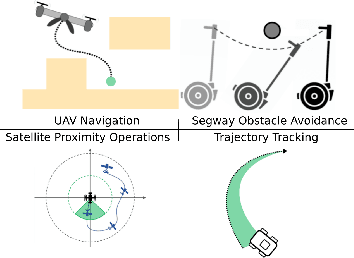
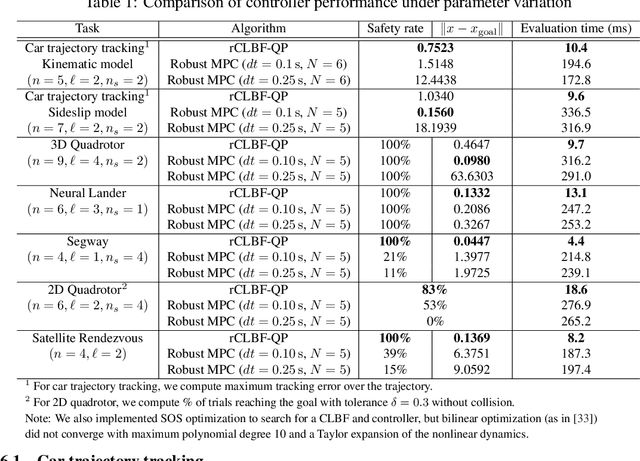

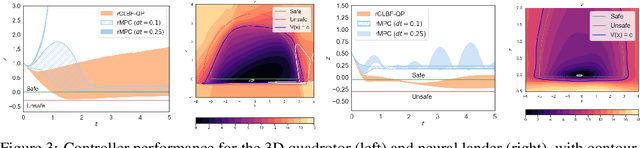
Safety and stability are common requirements for robotic control systems; however, designing safe, stable controllers remains difficult for nonlinear and uncertain models. We develop a model-based learning approach to synthesize robust feedback controllers with safety and stability guarantees. We take inspiration from robust convex optimization and Lyapunov theory to define robust control Lyapunov barrier functions that generalize despite model uncertainty. We demonstrate our approach in simulation on problems including car trajectory tracking, nonlinear control with obstacle avoidance, satellite rendezvous with safety constraints, and flight control with a learned ground effect model. Simulation results show that our approach yields controllers that match or exceed the capabilities of robust MPC while reducing computational costs by an order of magnitude.