Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Control and Learning Using Generalized Action Governor
Paper and Code
Nov 22, 2022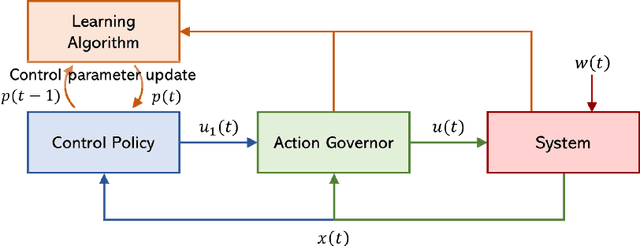
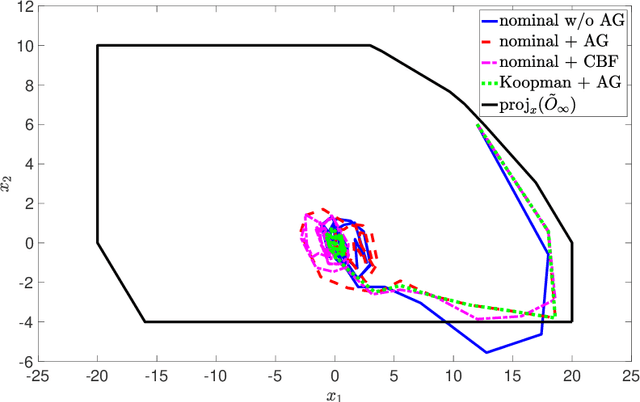
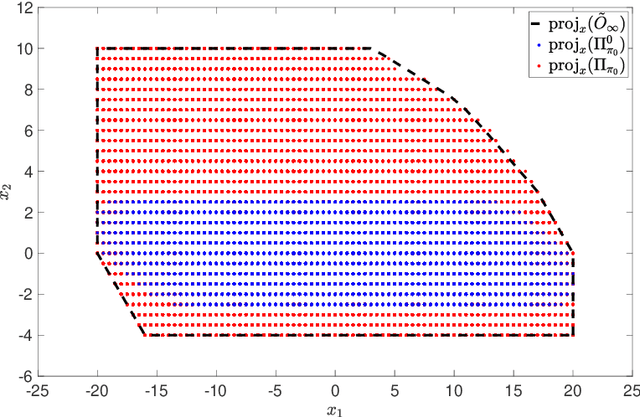
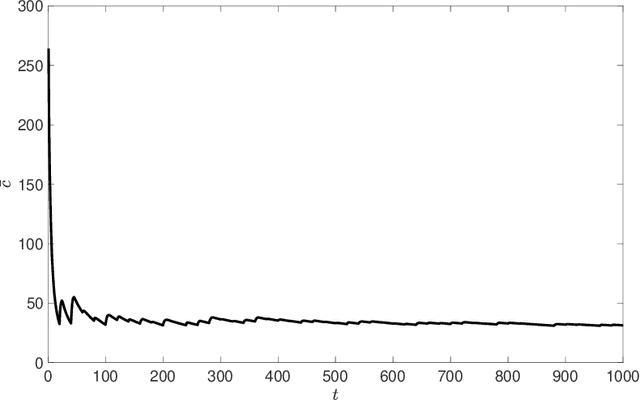
This paper introduces the Generalized Action Governor, which is a supervisory scheme for augmenting a nominal closed-loop system with the capability of strictly handling constraints. After presenting its theory for general systems and introducing tailored design approaches for linear and discrete systems, we discuss its application to safe online learning, which aims to safely evolve control parameters using real-time data to improve performance for uncertain systems. In particular, we propose two safe learning algorithms based on integration of reinforcement learning/data-driven Koopman operator-based control with the generalized action governor. The developments are illustrated with a numerical example.
* 10 pages, 4 figures
View paper on