Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSACPlanner: Real-World Collision Avoidance with a Soft Actor Critic Local Planner and Polar State Representations
Paper and Code
Mar 21, 2023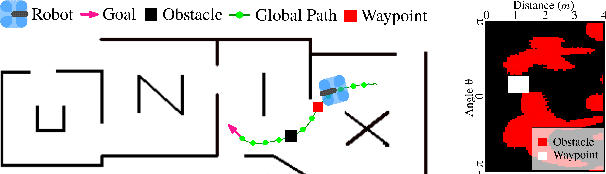
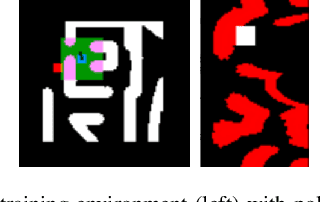
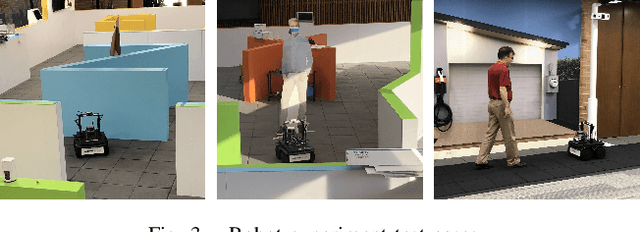

We study the training performance of ROS local planners based on Reinforcement Learning (RL), and the trajectories they produce on real-world robots. We show that recent enhancements to the Soft Actor Critic (SAC) algorithm such as RAD and DrQ achieve almost perfect training after only 10000 episodes. We also observe that on real-world robots the resulting SACPlanner is more reactive to obstacles than traditional ROS local planners such as DWA.
* Accepted at 2023 IEEE International Conference on Robotics and
Automation (ICRA)
View paper on