Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS-RL Toolbox: Environments, Datasets and Evaluation Metrics for State Representation Learning
Paper and Code
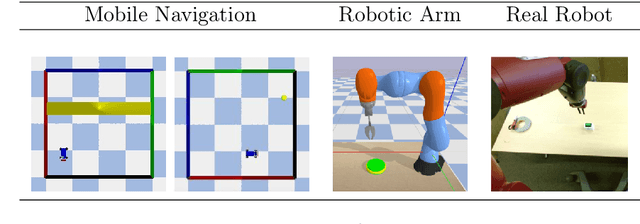
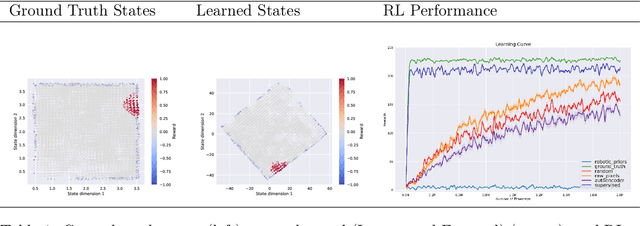
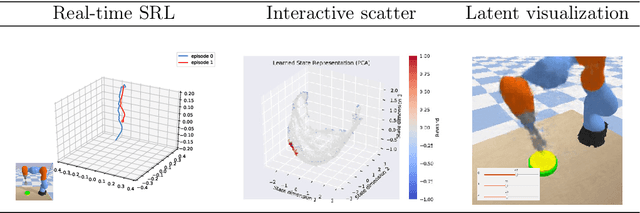
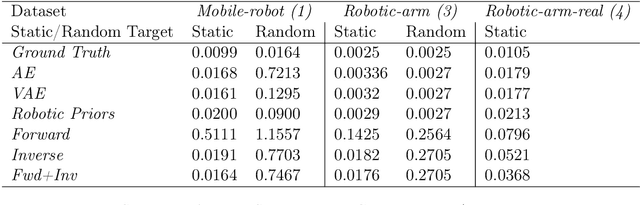
State representation learning aims at learning compact representations from raw observations in robotics and control applications. Approaches used for this objective are auto-encoders, learning forward models, inverse dynamics or learning using generic priors on the state characteristics. However, the diversity in applications and methods makes the field lack standard evaluation datasets, metrics and tasks. This paper provides a set of environments, data generators, robotic control tasks, metrics and tools to facilitate iterative state representation learning and evaluation in reinforcement learning settings.
* Github repo: https://github.com/araffin/robotics-rl-srl
Documentation: https://s-rl-toolbox.readthedocs.io/en/latest/
View paper on