 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotational Projection Statistics for 3D Local Surface Description and Object Recognition
Paper and Code
Apr 11, 2013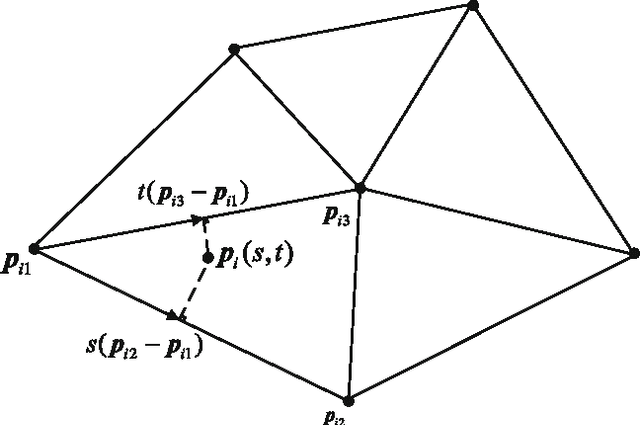
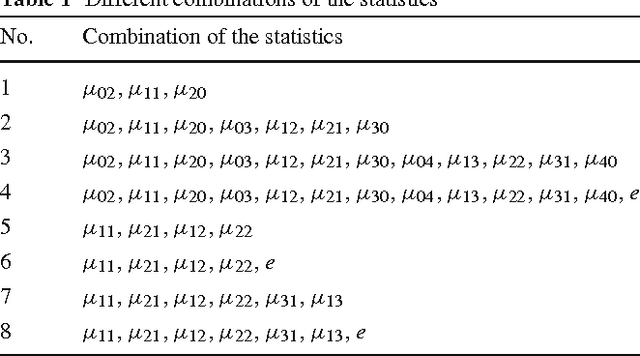
Recognizing 3D objects in the presence of noise, varying mesh resolution, occlusion and clutter is a very challenging task. This paper presents a novel method named Rotational Projection Statistics (RoPS). It has three major modules: Local Reference Frame (LRF) definition, RoPS feature description and 3D object recognition. We propose a novel technique to define the LRF by calculating the scatter matrix of all points lying on the local surface. RoPS feature descriptors are obtained by rotationally projecting the neighboring points of a feature point onto 2D planes and calculating a set of statistics (including low-order central moments and entropy) of the distribution of these projected points. Using the proposed LRF and RoPS descriptor, we present a hierarchical 3D object recognition algorithm. The performance of the proposed LRF, RoPS descriptor and object recognition algorithm was rigorously tested on a number of popular and publicly available datasets. Our proposed techniques exhibited superior performance compared to existing techniques. We also showed that our method is robust with respect to noise and varying mesh resolution. Our RoPS based algorithm achieved recognition rates of 100%, 98.9%, 95.4% and 96.0% respectively when tested on the Bologna, UWA, Queen's and Ca' Foscari Venezia Datasets.