 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoCUS: Robot Controller Understanding via Sampling
Paper and Code
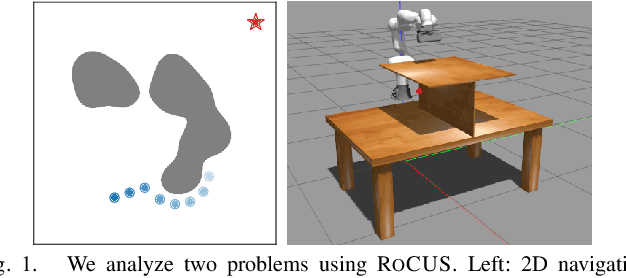
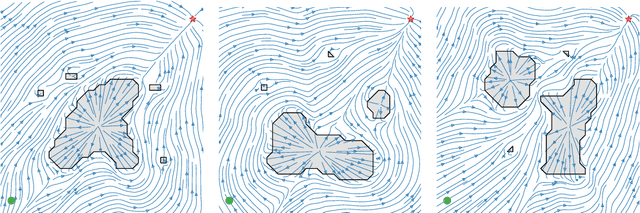
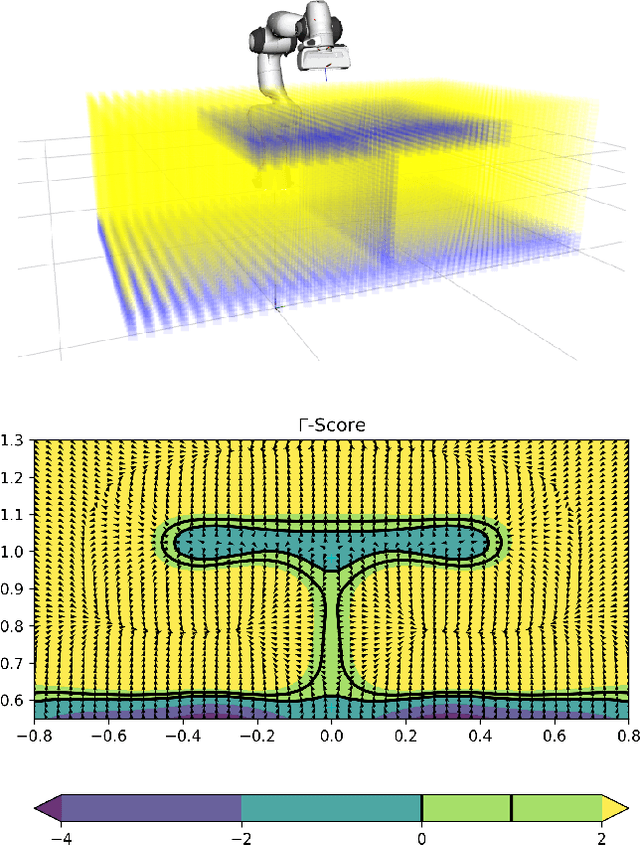
As robots are deployed in complex situations, engineers and end users must develop a holistic understanding of their capabilities and behaviors. Existing research focuses mainly on factors related to task completion, such as success rate, completion time, or total energy consumption. Other factors like collision avoidance behavior, trajectory smoothness, and motion legibility are equally or more important for safe and trustworthy deployment. While methods exist to analyze these quality factors for individual trajectories or distributions of trajectories, these statistics may be insufficient to develop a mental model of the controller's behaviors, especially uncommon behaviors. We present RoCUS: a Bayesian sampling-based method to find situations that lead to trajectories which exhibit certain behaviors. By analyzing these situations and trajectories, we can gain important insights into the controller that are easily missed in standard task-completion evaluations. On a 2D navigation problem and a 7 degree-of-freedom (DoF) arm reaching problem, we analyze three controllers: a rapidly exploring random tree (RRT) planner, a dynamical system (DS) formulation, and a deep imitation learning (IL) or reinforcement learning (RL) model. We show how RoCUS can uncover insights to further our understanding about them beyond task-completion aspects. The code is available at https://github.com/YilunZhou/RoCUS.