 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Place Recognition using an Imaging Lidar
Paper and Code
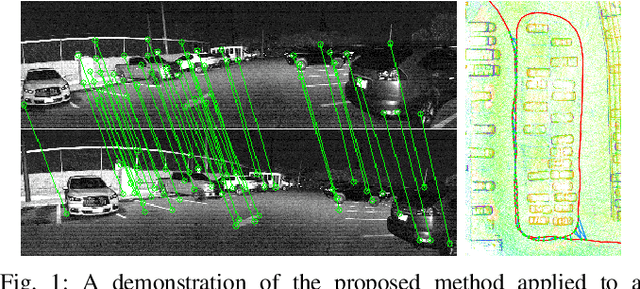
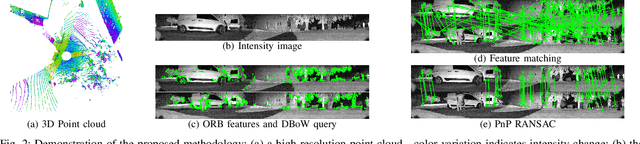
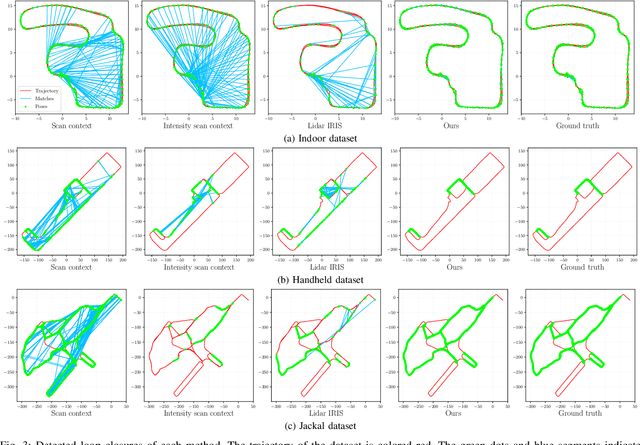
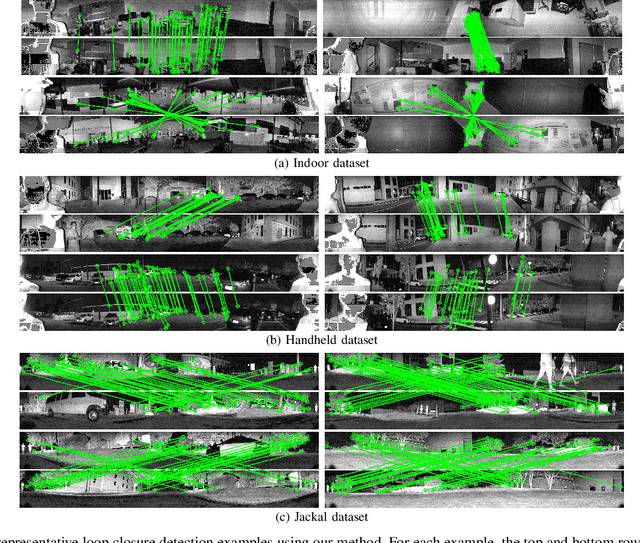
We propose a methodology for robust, real-time place recognition using an imaging lidar, which yields image-quality high-resolution 3D point clouds. Utilizing the intensity readings of an imaging lidar, we project the point cloud and obtain an intensity image. ORB feature descriptors are extracted from the image and encoded into a bag-of-words vector. The vector, used to identify the point cloud, is inserted into a database that is maintained by DBoW for fast place recognition queries. The returned candidate is further validated by matching visual feature descriptors. To reject matching outliers, we apply PnP, which minimizes the reprojection error of visual features' positions in Euclidean space with their correspondences in 2D image space, using RANSAC. Combining the advantages from both camera and lidar-based place recognition approaches, our method is truly rotation-invariant and can tackle reverse revisiting and upside-down revisiting. The proposed method is evaluated on datasets gathered from a variety of platforms over different scales and environments. Our implementation is available at https://git.io/imaging-lidar-place-recognition