 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Manipulation Primitive Learning via Domain Contraction
Paper and Code
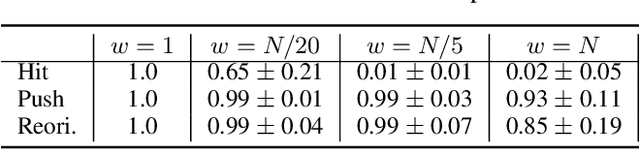



Contact-rich manipulation plays an important role in human daily activities, but uncertain parameters pose significant challenges for robots to achieve comparable performance through planning and control. To address this issue, domain adaptation and domain randomization have been proposed for robust policy learning. However, they either lose the generalization ability across diverse instances or perform conservatively due to neglecting instance-specific information. In this paper, we propose a bi-level approach to learn robust manipulation primitives, including parameter-augmented policy learning using multiple models, and parameter-conditioned policy retrieval through domain contraction. This approach unifies domain randomization and domain adaptation, providing optimal behaviors while keeping generalization ability. We validate the proposed method on three contact-rich manipulation primitives: hitting, pushing, and reorientation. The experimental results showcase the superior performance of our approach in generating robust policies for instances with diverse physical parameters.