 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Biped Locomotion Using Deep Reinforcement Learning on Top of an Analytical Control Approach
Paper and Code


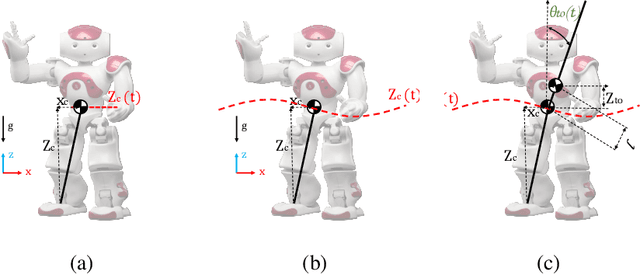
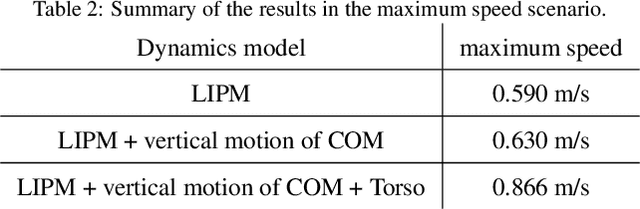
This paper proposes a modular framework to generate robust biped locomotion using a tight coupling between an analytical walking approach and deep reinforcement learning. This framework is composed of six main modules which are hierarchically connected to reduce the overall complexity and increase its flexibility. The core of this framework is a specific dynamics model which abstracts a humanoid's dynamics model into two masses for modeling upper and lower body. This dynamics model is used to design an adaptive reference trajectories planner and an optimal controller which are fully parametric. Furthermore, a learning framework is developed based on Genetic Algorithm (GA) and Proximal Policy Optimization (PPO) to find the optimum parameters and to learn how to improve the stability of the robot by moving the arms and changing its center of mass (COM) height. A set of simulations are performed to validate the performance of the framework using the official RoboCup 3D League simulation environment. The results validate the performance of the framework, not only in creating a fast and stable gait but also in learning to improve the upper body efficiency.