 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Autonomous Landing of UAV in Non-Cooperative Environments based on Dynamic Time Camera-LiDAR Fusion
Paper and Code
Nov 27, 2020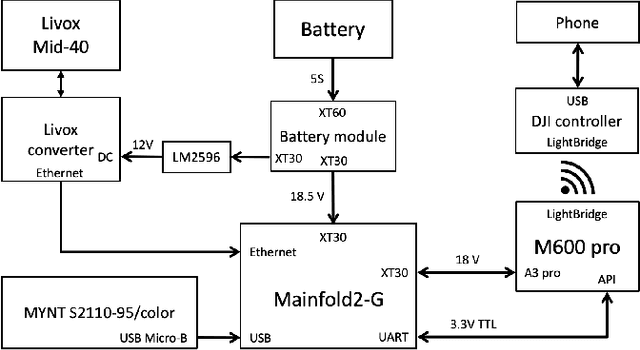
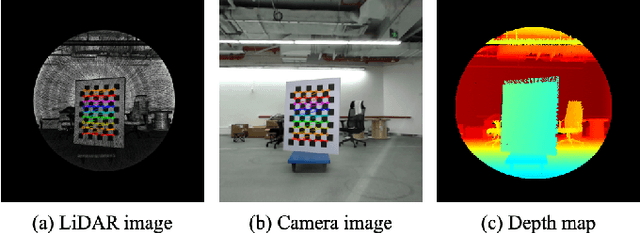
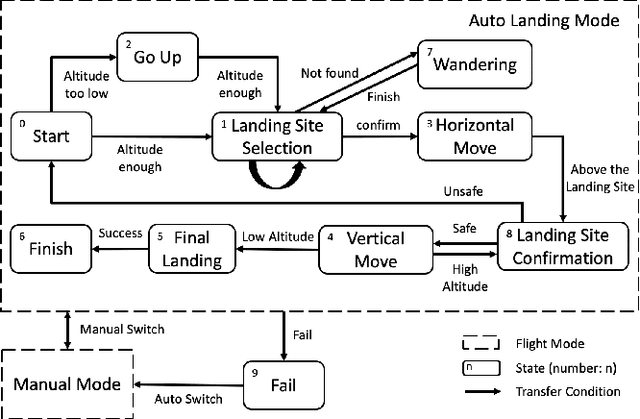
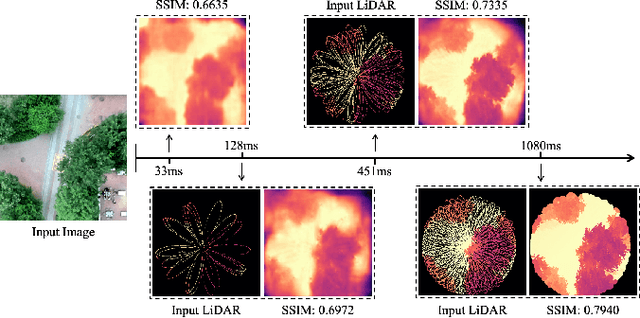
Selecting safe landing sites in non-cooperative environments is a key step towards the full autonomy of UAVs. However, the existing methods have the common problems of poor generalization ability and robustness. Their performance in unknown environments is significantly degraded and the error cannot be self-detected and corrected. In this paper, we construct a UAV system equipped with low-cost LiDAR and binocular cameras to realize autonomous landing in non-cooperative environments by detecting the flat and safe ground area. Taking advantage of the non-repetitive scanning and high FOV coverage characteristics of LiDAR, we come up with a dynamic time depth completion algorithm. In conjunction with the proposed self-evaluation method of the depth map, our model can dynamically select the LiDAR accumulation time at the inference phase to ensure an accurate prediction result. Based on the depth map, the high-level terrain information such as slope, roughness, and the size of the safe area are derived. We have conducted extensive autonomous landing experiments in a variety of familiar or completely unknown environments, verifying that our model can adaptively balance the accuracy and speed, and the UAV can robustly select a safe landing site.