 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots State Estimation and Observability Analysis Based on Statistical Motion Models
Paper and Code
Oct 12, 2020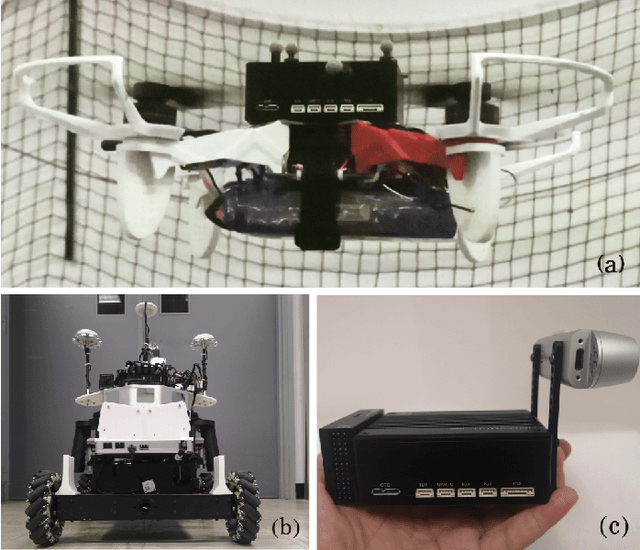
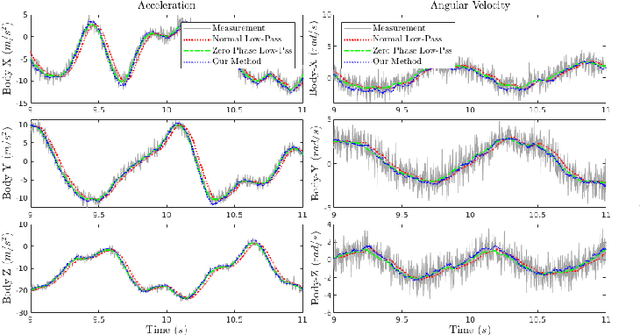
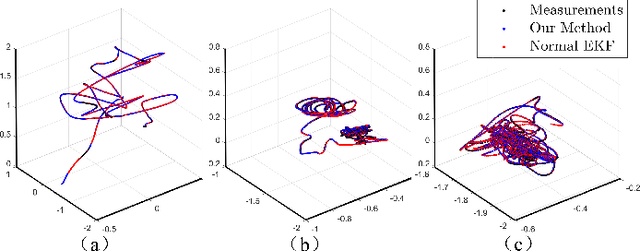
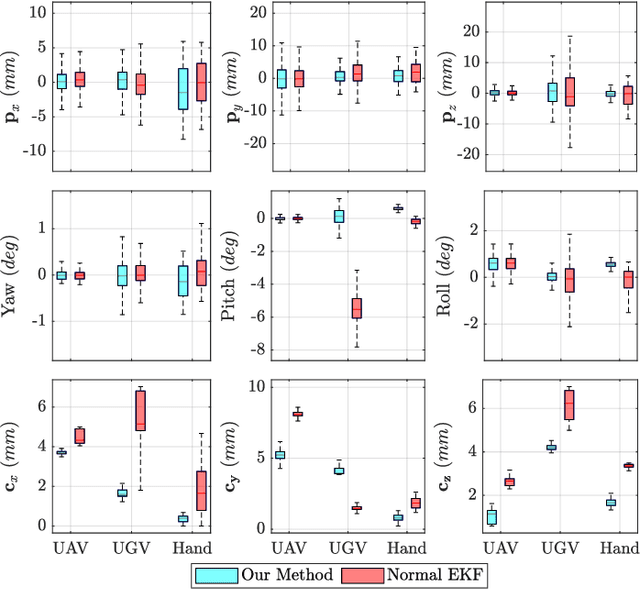
This paper presents a generic motion model to capture mobile robots' dynamic behaviors (translation and rotation). The model is based on statistical models driven by white random processes and is formulated into a full state estimation algorithm based on the error-state extended Kalman filtering framework (ESEKF). Major benefits of this method are its versatility, being applicable to different robotic systems without accurately modeling the robots' specific dynamics, and ability to estimate the robot's (angular) acceleration, jerk, or higher-order dynamic states with low delay. Mathematical analysis with numerical simulations are presented to show the properties of the statistical model-based estimation framework and to reveal its connection to existing low-pass filters. Furthermore, a new paradigm is developed for robots observability analysis by developing Lie derivatives and associated partial differentiation directly on manifolds. It is shown that this new paradigm is much simpler and more natural than existing methods based on quaternion parameterizations. It is also scalable to high dimensional systems. A novel \textbf{\textit{thin}} set concept is introduced to characterize the unobservable subset of the system states, providing the theoretical foundation to observability analysis of robotic systems operating on manifolds and in high dimension. Finally, extensive experiments including full state estimation and extrinsic calibration (both POS-IMU and IMU-IMU) on a quadrotor UAV, a handheld platform and a ground vehicle are conducted. Comparisons with existing methods show that the proposed method can effectively estimate all extrinsic parameters, the robot's translation/angular acceleration and other state variables (e.g., position, velocity, attitude) of high accuracy and low delay.