 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Perception of Transparent Objects: A Review
Paper and Code
Mar 31, 2023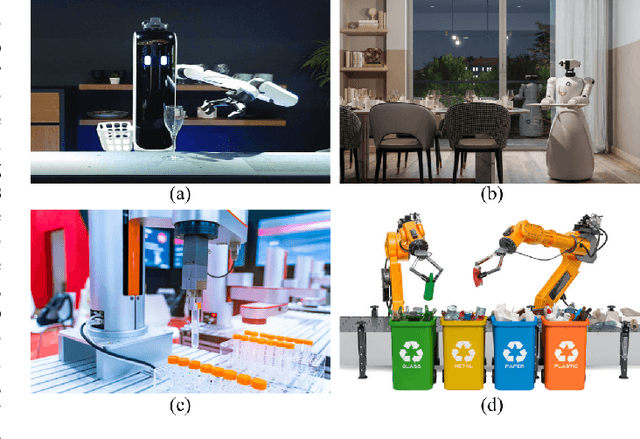
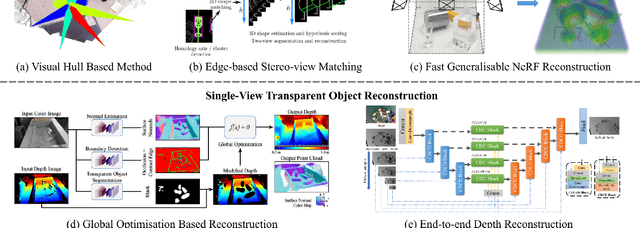
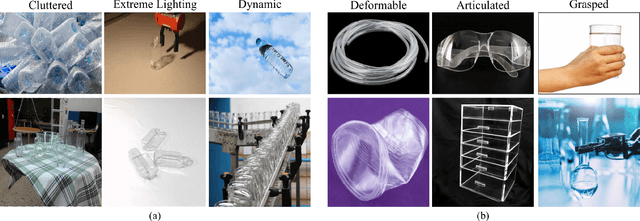
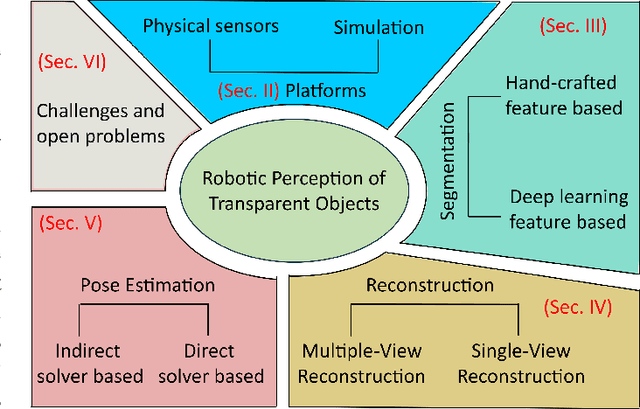
Transparent object perception is a rapidly developing research problem in artificial intelligence. The ability to perceive transparent objects enables robots to achieve higher levels of autonomy, unlocking new applications in various industries such as healthcare, services and manufacturing. Despite numerous datasets and perception methods being proposed in recent years, there is still a lack of in-depth understanding of these methods and the challenges in this field. To address this gap, this article provides a comprehensive survey of the platforms and recent advances for robotic perception of transparent objects. We highlight the main challenges and propose future directions of various transparent object perception tasks, i.e., segmentation, reconstruction, and pose estimation. We also discuss the limitations of existing datasets in diversity and complexity, and the benefits of employing multi-modal sensors, such as RGB-D cameras, thermal cameras, and polarised imaging, for transparent object perception. Furthermore, we identify perception challenges in complex and dynamic environments, as well as for objects with changeable geometries. Finally, we provide an interactive online platform to navigate each reference: \url{https://sites.google.com/view/transperception}.