 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Sound Interpretation: Combining Sight and Sound in Learning-Based Control
Paper and Code
Sep 19, 2019
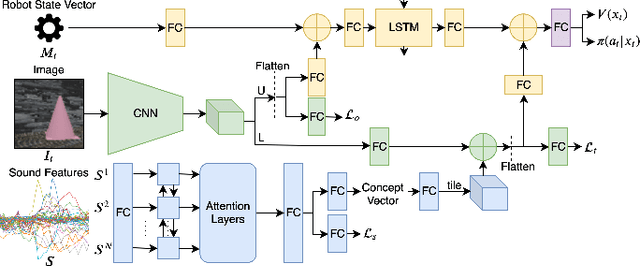


We explore the interpretation of sound for robot decision-making, inspired by human speech comprehension. While previous methods use natural language processing to translate sound to text, we propose an end-to-end deep neural network which directly learns control polices from images and sound signals. The network is trained using reinforcement learning with auxiliary losses on the sight and sound network branches. We demonstrate our approach on two robots, a TurtleBot3 and a Kuka-IIWA arm, which hear a command word, identify the associated target object, and perform precise control to reach the target. For both systems, we perform ablation studies in simulation to show the effectiveness of our network empirically. We also successfully transfer the policy learned in simulator to a real-world TurtleBot3, which effectively understands word commands, searches for the object, and moves toward that location with more intuitive motion than a traditional motion planner with perfect information.