 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboBrain: Large-Scale Knowledge Engine for Robots
Paper and Code
Apr 12, 2015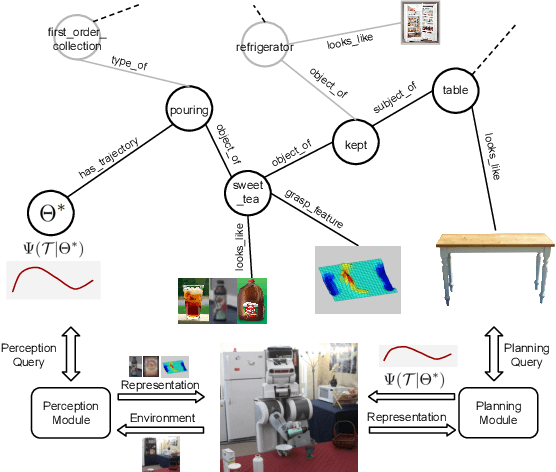
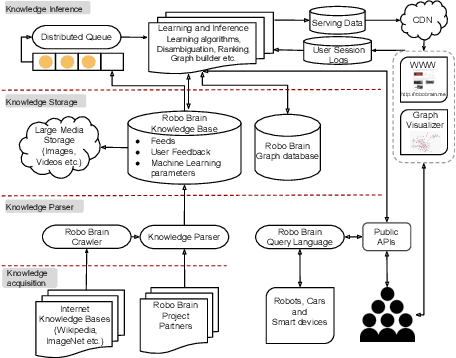
In this paper we introduce a knowledge engine, which learns and shares knowledge representations, for robots to carry out a variety of tasks. Building such an engine brings with it the challenge of dealing with multiple data modalities including symbols, natural language, haptic senses, robot trajectories, visual features and many others. The \textit{knowledge} stored in the engine comes from multiple sources including physical interactions that robots have while performing tasks (perception, planning and control), knowledge bases from the Internet and learned representations from several robotics research groups. We discuss various technical aspects and associated challenges such as modeling the correctness of knowledge, inferring latent information and formulating different robotic tasks as queries to the knowledge engine. We describe the system architecture and how it supports different mechanisms for users and robots to interact with the engine. Finally, we demonstrate its use in three important research areas: grounding natural language, perception, and planning, which are the key building blocks for many robotic tasks. This knowledge engine is a collaborative effort and we call it RoboBrain.