 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRMMI: Enhanced Obstacle Avoidance for Reactive Mobile Manipulation using an Implicit Neural Map
Paper and Code
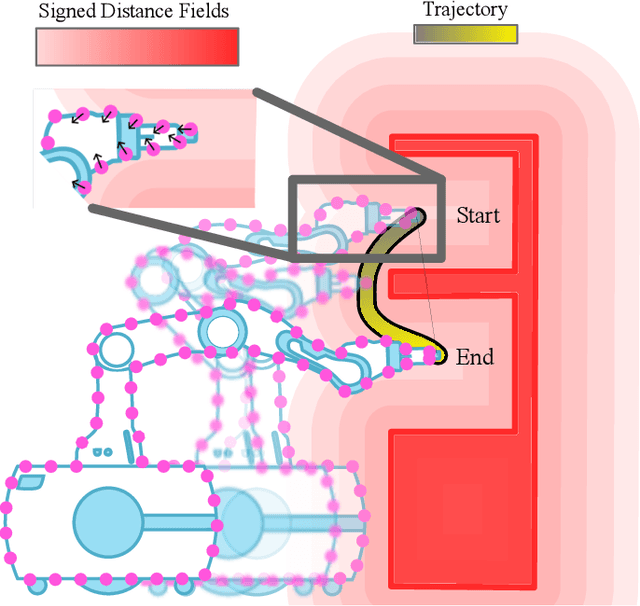
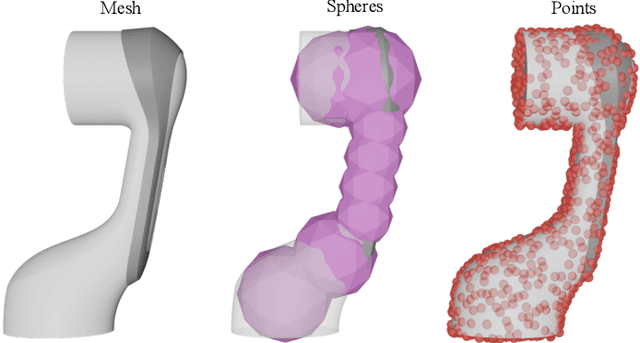
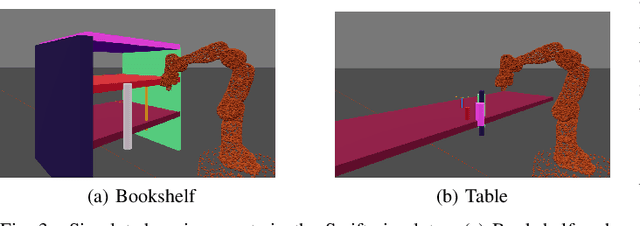
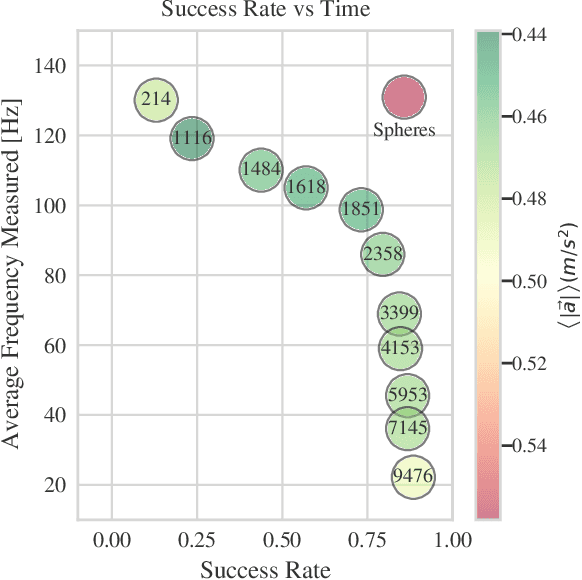
We introduce RMMI, a novel reactive control framework for mobile manipulators operating in complex, static environments. Our approach leverages a neural Signed Distance Field (SDF) to model intricate environment details and incorporates this representation as inequality constraints within a Quadratic Program (QP) to coordinate robot joint and base motion. A key contribution is the introduction of an active collision avoidance cost term that maximises the total robot distance to obstacles during the motion. We first evaluate our approach in a simulated reaching task, outperforming previous methods that rely on representing both the robot and the scene as a set of primitive geometries. Compared with the baseline, we improved the task success rate by 25% in total, which includes increases of 10% by using the active collision cost. We also demonstrate our approach on a real-world platform, showing its effectiveness in reaching target poses in cluttered and confined spaces using environment models built directly from sensor data. For additional details and experiment videos, visit https://rmmi.github.io/.