 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRMG: Real-Time Expressive Motion Generation with Self-collision Avoidance for 6-DOF Companion Robotic Arms
Paper and Code
Mar 13, 2025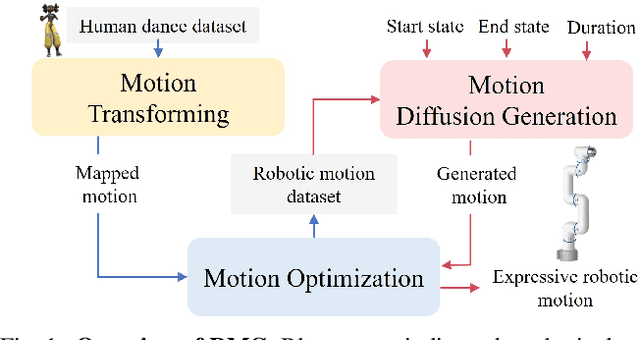
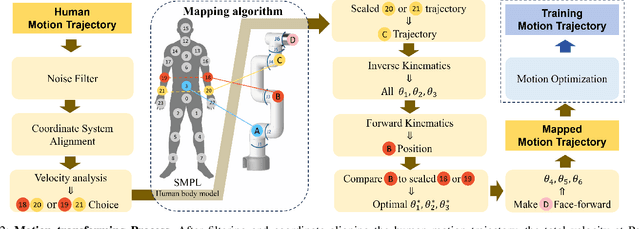
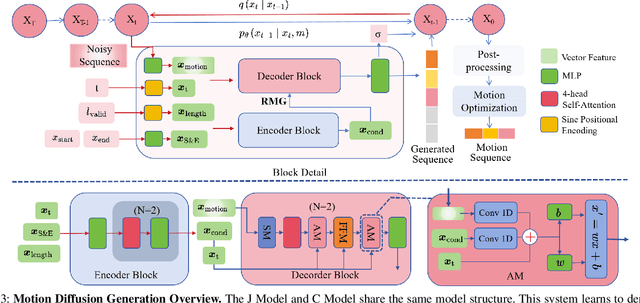
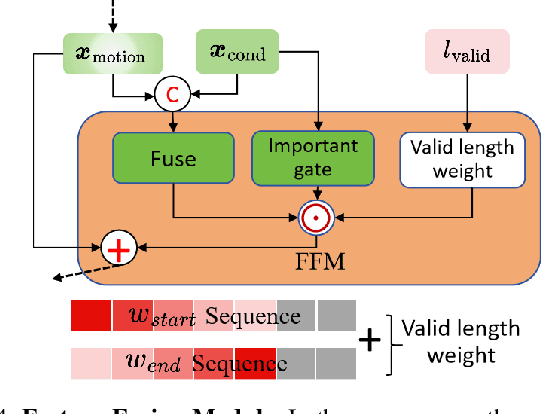
The six-degree-of-freedom (6-DOF) robotic arm has gained widespread application in human-coexisting environments. While previous research has predominantly focused on functional motion generation, the critical aspect of expressive motion in human-robot interaction remains largely unexplored. This paper presents a novel real-time motion generation planner that enhances interactivity by creating expressive robotic motions between arbitrary start and end states within predefined time constraints. Our approach involves three key contributions: first, we develop a mapping algorithm to construct an expressive motion dataset derived from human dance movements; second, we train motion generation models in both Cartesian and joint spaces using this dataset; third, we introduce an optimization algorithm that guarantees smooth, collision-free motion while maintaining the intended expressive style. Experimental results demonstrate the effectiveness of our method, which can generate expressive and generalized motions in under 0.5 seconds while satisfying all specified constraints.