 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Lane Selection on Highway with Dynamic Obstacles
Paper and Code
Apr 08, 2021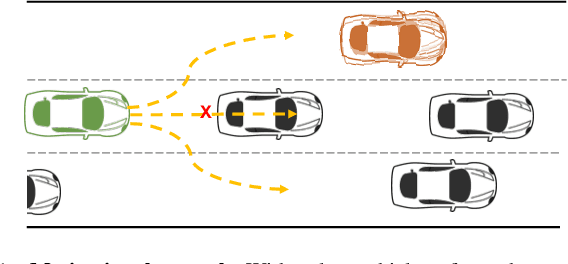

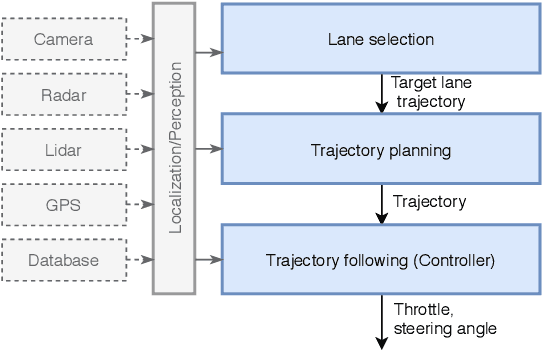
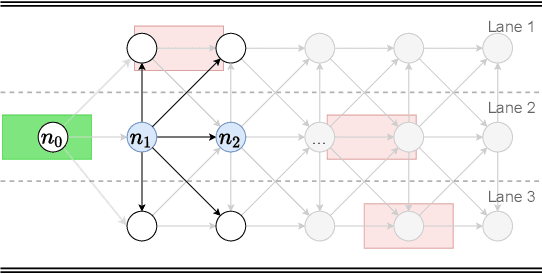
This paper proposes a discretionary lane selection algorithm. In particular, highway driving is considered as a targeted scenario, where each lane has a different level of traffic flow. When lane-changing is discretionary, it is advised not to change lanes unless highly beneficial, e.g., reducing travel time significantly or securing higher safety. Evaluating such "benefit" is a challenge, along with multiple surrounding vehicles in dynamic speed and heading with uncertainty. We propose a real-time lane-selection algorithm with careful cost considerations and with modularity in design. The algorithm is a search-based optimization method that evaluates uncertain dynamic positions of other vehicles under a continuous time and space domain. For demonstration, we incorporate a state-of-the-art motion planner framework (Neural Networks integrated Model Predictive Control) under a CARLA simulation environment.