 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRISAS: A Novel Rotation, Illumination, Scale Invariant Appearance and Shape Feature
Paper and Code
Sep 19, 2016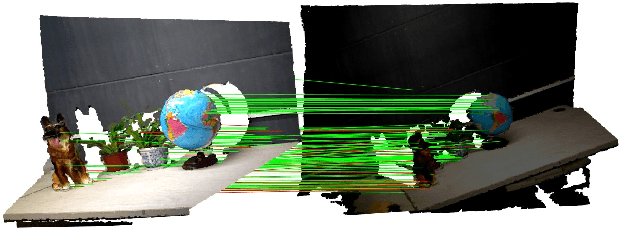
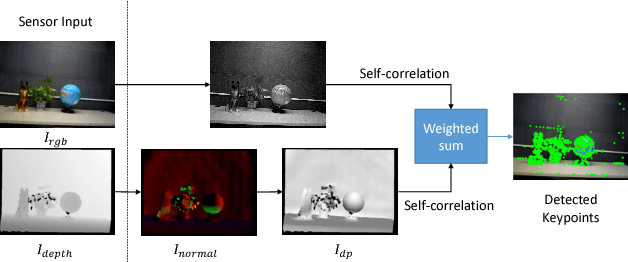
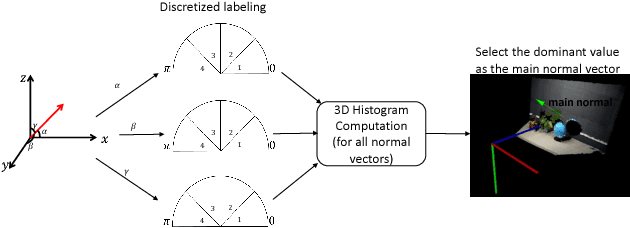
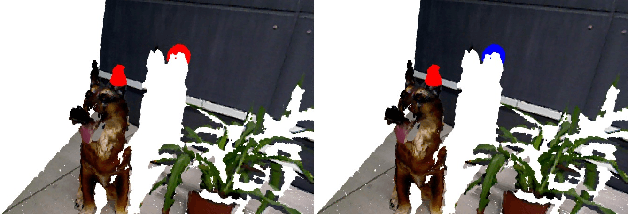
This paper presents a novel appearance and shape feature, RISAS, which is robust to viewpoint, illumination, scale and rotation variations. RISAS consists of a keypoint detector and a feature descriptor both of which utilise texture and geometric information present in the appearance and shape channels. A novel response function based on the surface normals is used in combination with the Harris corner detector for selecting keypoints in the scene. A strategy that uses the depth information for scale estimation and background elimination is proposed to select the neighbourhood around the keypoints in order to build precise invariant descriptors. Proposed descriptor relies on the ordering of both grayscale intensity and shape information in the neighbourhood. Comprehensive experiments which confirm the effectiveness of the proposed RGB-D feature when compared with CSHOT and LOIND are presented. Furthermore, we highlight the utility of incorporating texture and shape information in the design of both the detector and the descriptor by demonstrating the enhanced performance of CSHOT and LOIND when combined with RISAS detector.