 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRF Backscatter-based State Estimation for Micro Aerial Vehicles
Paper and Code
Dec 19, 2019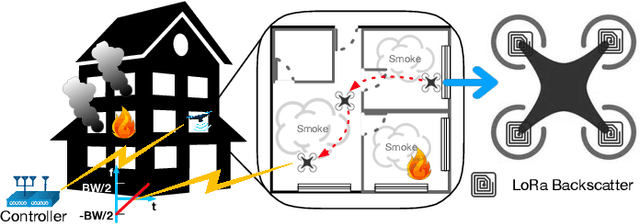
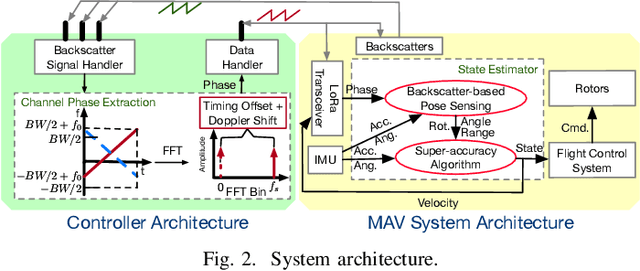
The advances in compact and agile micro aerial vehicles (MAVs) have shown great potential in replacing human for labor-intensive or dangerous indoor investigation, such as warehouse management and fire rescue. However, the design of a state estimation system that enables autonomous flight in such dim or smoky environments presents a conundrum: conventional GPS or computer vision based solutions only work in outdoors or well-lighted texture-rich environments. This paper takes the first step to overcome this hurdle by proposing Marvel, a lightweight RF backscatter-based state estimation system for MAVs in indoors. Marvel is nonintrusive to commercial MAVs by attaching backscatter tags to their landing gears without internal hardware modifications, and works in a plug-and-play fashion that does not require any infrastructure deployment, pre-trained signatures, or even without knowing the controller's location. The enabling techniques are a new backscatter-based pose sensing module and a novel backscatter-inertial super-accuracy state estimation algorithm. We demonstrate our design by programming a commercial-off-the-shelf MAV to autonomously fly in different trajectories. The results show that Marvel supports navigation within a range of $50$ m or through three concrete walls, with an accuracy of $34$ cm for localization and $4.99^\circ$ for orientation estimation, outperforming commercial GPS-based approaches in outdoors.