Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReward (Mis)design for Autonomous Driving
Paper and Code
Apr 28, 2021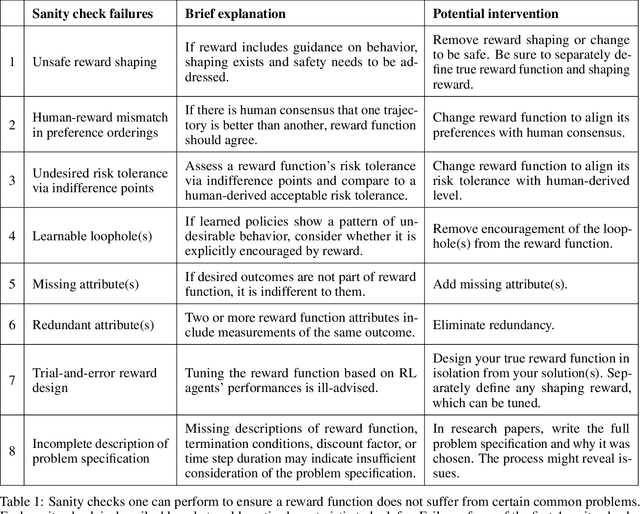
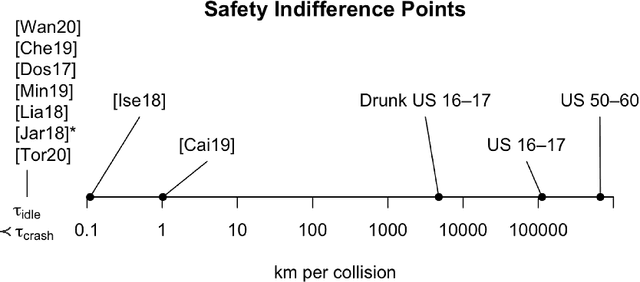
This paper considers the problem of reward design for autonomous driving (AD), with insights that are also applicable to the design of cost functions and performance metrics more generally. Herein we develop 8 simple sanity checks for identifying flaws in reward functions. The sanity checks are applied to reward functions from past work on reinforcement learning (RL) for autonomous driving, revealing near-universal flaws in reward design for AD that might also exist pervasively across reward design for other tasks. Lastly, we explore promising directions that may help future researchers design reward functions for AD.
* 13 pages (25 pages with appendix), 4 figures
View paper on