 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResampling-free Particle Filters in High-dimensions
Paper and Code

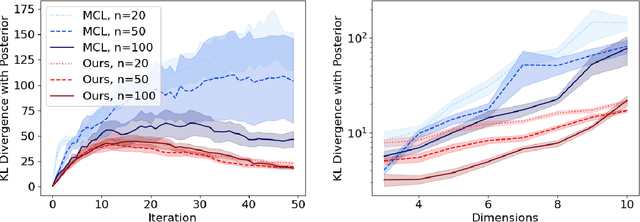

State estimation is crucial for the performance and safety of numerous robotic applications. Among the suite of estimation techniques, particle filters have been identified as a powerful solution due to their non-parametric nature. Yet, in high-dimensional state spaces, these filters face challenges such as 'particle deprivation' which hinders accurate representation of the true posterior distribution. This paper introduces a novel resampling-free particle filter designed to mitigate particle deprivation by forgoing the traditional resampling step. This ensures a broader and more diverse particle set, especially vital in high-dimensional scenarios. Theoretically, our proposed filter is shown to offer a near-accurate representation of the desired posterior distribution in high-dimensional contexts. Empirically, the effectiveness of our approach is underscored through a high-dimensional synthetic state estimation task and a 6D pose estimation derived from videos. We posit that as robotic systems evolve with greater degrees of freedom, particle filters tailored for high-dimensional state spaces will be indispensable.