 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelevant Region Sampling Strategy with Adaptive Heuristic Estimation for Asymptotically Optimal Motion Planning
Paper and Code
Oct 31, 2021
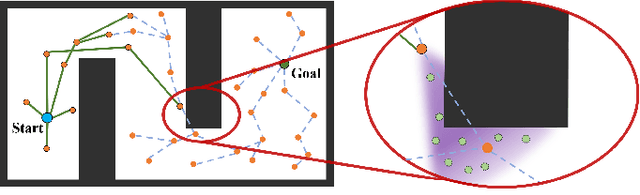
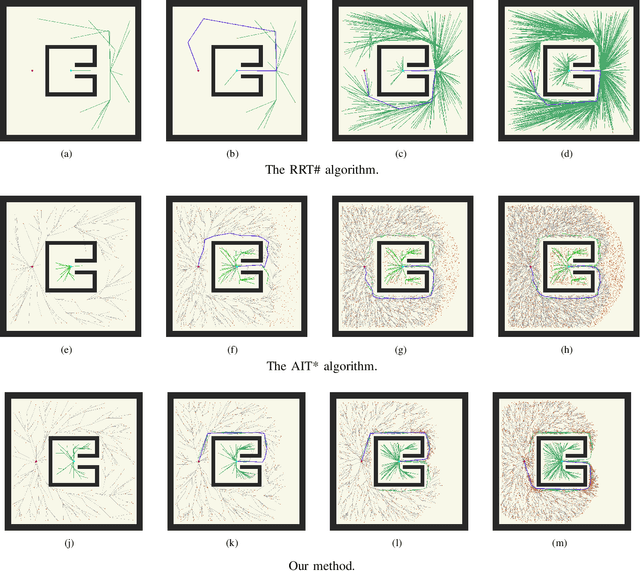
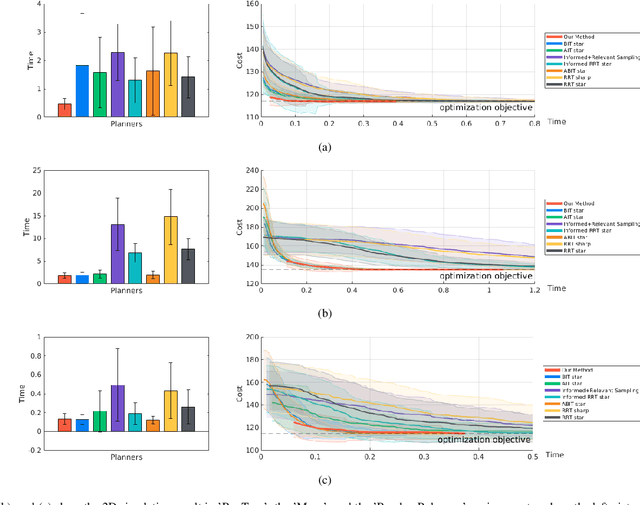
The sampling-based motion planning algorithms can solve the motion planning problem in high-dimensional state space efficiently. This article presents a novel approach to sample in the promising region and reduce planning time remarkably. The RRT# defines the Relevant Region according to the cost-to-come provided by the optimal forward-searching tree; however, it takes the cumulative cost of a direct connection between the current state and the goal state as the cost-to-go. We propose a batch sampling method that samples in the refined Relevant Region, which is defined according to the optimal cost-to-come and the adaptive cost-to-go. In our method, the cost-to-come and the cost-to-go of a specific vertex are estimated by the valid optimal forward-searching tree and the lazy reverse-searching tree, respectively. New samples are generated with a direct sampling method, which can take advantage of the heuristic estimation result. We carry on several simulations in both SE(2) and SE(3) state spaces to validate the effectiveness of our method. Simulation results demonstrate that the proposed algorithm can find a better initial solution and consumes less planning time than related work.