 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Probabilistic Guarantees for Autonomous Driving
Paper and Code
May 29, 2019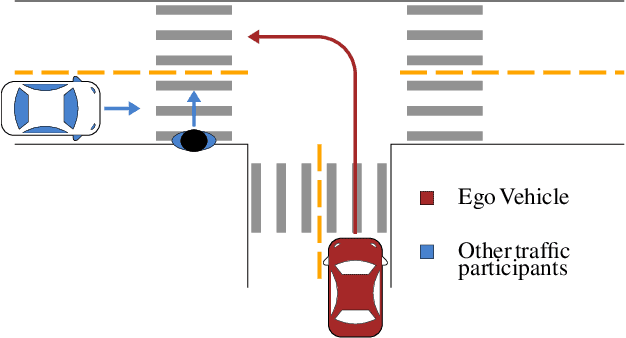
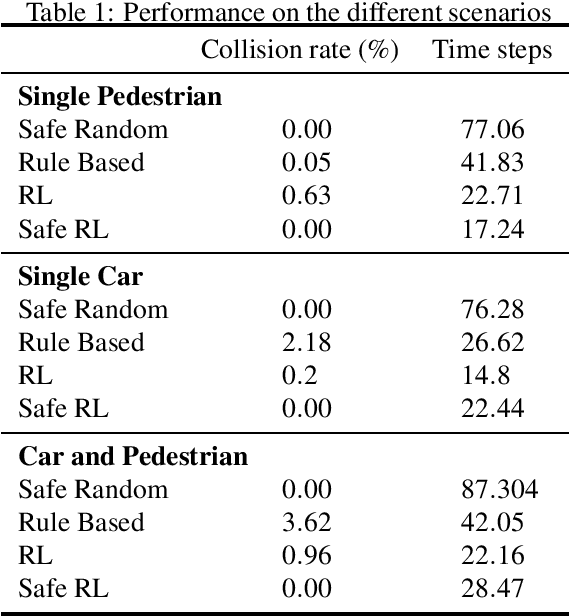
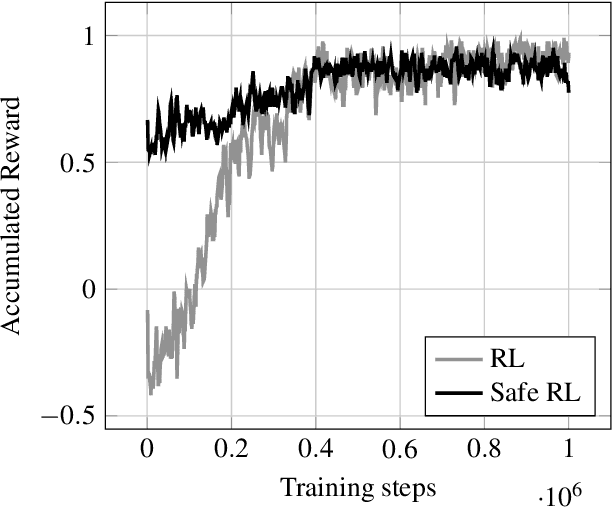
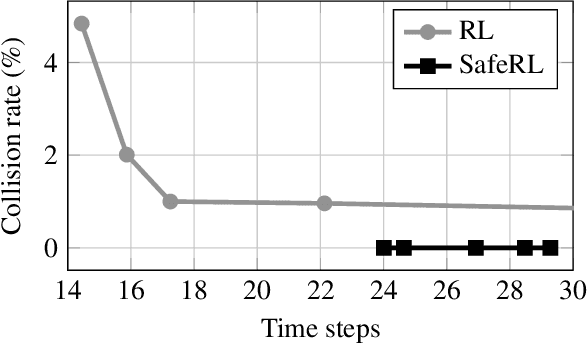
Designing reliable decision strategies for autonomous urban driving is challenging. Reinforcement learning (RL) has been used to automatically derive suitable behavior in uncertain environments, but it does not provide any guarantee on the performance of the resulting policy. We propose a generic approach to enforce probabilistic guarantees on an RL agent. An exploration strategy is derived prior to training that constrains the agent to choose among actions that satisfy a desired probabilistic specification expressed with linear temporal logic (LTL). Reducing the search space to policies satisfying the LTL formula helps training and simplifies reward design. This paper outlines a case study of an intersection scenario involving multiple traffic participants. The resulting policy outperforms a rule-based heuristic approach in terms of efficiency while exhibiting strong guarantees on safety.