 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Orientation Estimation Using Inertial Sensors with Performance Guarantee
Paper and Code
Mar 03, 2021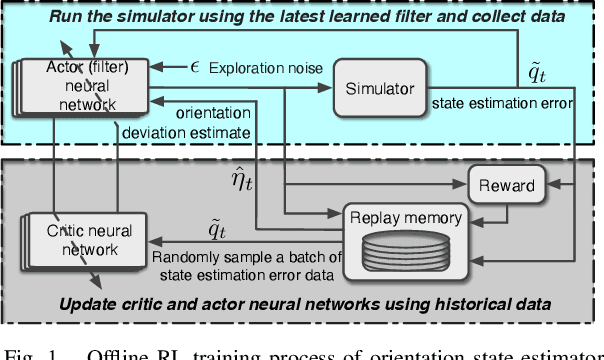
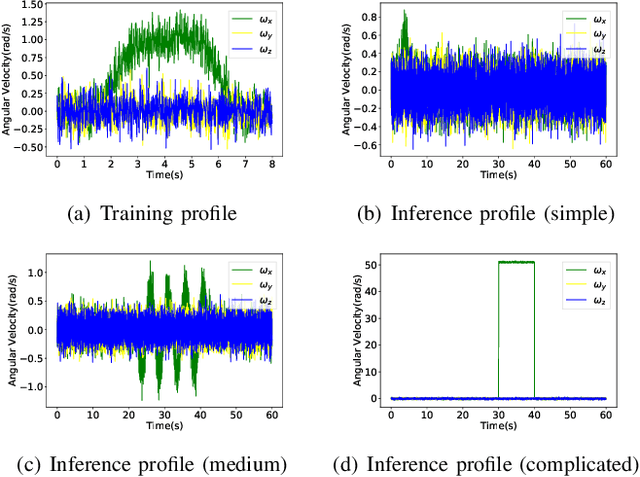
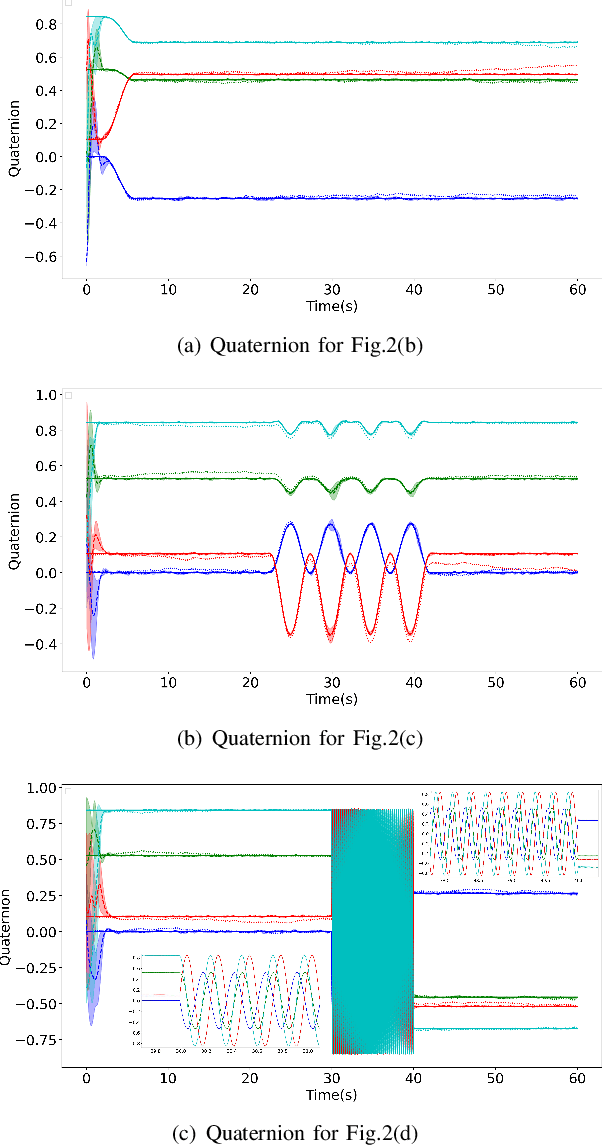
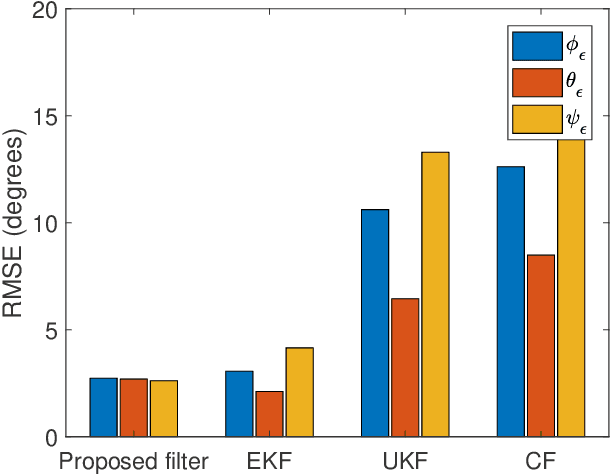
This paper presents a deep reinforcement learning (DRL) algorithm for orientation estimation using inertial sensors combined with magnetometer. The Lyapunov method in control theory is employed to prove the convergence of orientation estimation errors. Based on the theoretical results, the estimator gains and a Lyapunov function are parametrized by deep neural networks and learned from samples. The DRL estimator is compared with three well-known orientation estimation methods on both numerical simulations and real datasets collected from commercially available sensors. The results show that the proposed algorithm is superior for arbitrary estimation initialization and can adapt to very large angular velocities for which other algorithms can be hardly applicable. To the best of our knowledge, this is the first DRL-based orientation estimation method with estimation error boundedness guarantee.