 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegularized Anderson Acceleration for Off-Policy Deep Reinforcement Learning
Paper and Code
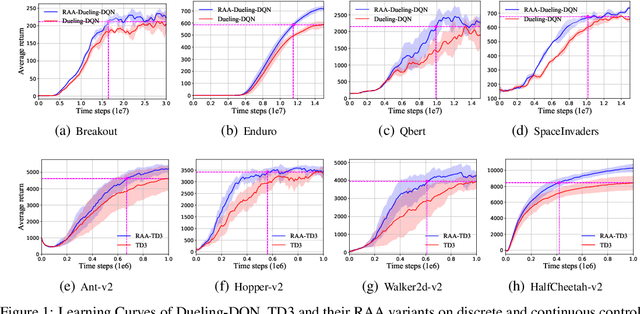
Model-free deep reinforcement learning (RL) algorithms have been widely used for a range of complex control tasks. However, slow convergence and sample inefficiency remain challenging problems in RL, especially when handling continuous and high-dimensional state spaces. To tackle this problem, we propose a general acceleration method for model-free, off-policy deep RL algorithms by drawing the idea underlying regularized Anderson acceleration (RAA), which is an effective approach to accelerating the solving of fixed point problems with perturbations. Specifically, we first explain how policy iteration can be applied directly with Anderson acceleration. Then we extend RAA to the case of deep RL by introducing a regularization term to control the impact of perturbation induced by function approximation errors. We further propose two strategies, i.e., progressive update and adaptive restart, to enhance the performance. The effectiveness of our method is evaluated on a variety of benchmark tasks, including Atari 2600 and MuJoCo. Experimental results show that our approach substantially improves both the learning speed and final performance of state-of-the-art deep RL algorithms.