 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefining Manually-Designed Symbol Grounding and High-Level Planning by Policy Gradients
Paper and Code
Sep 29, 2018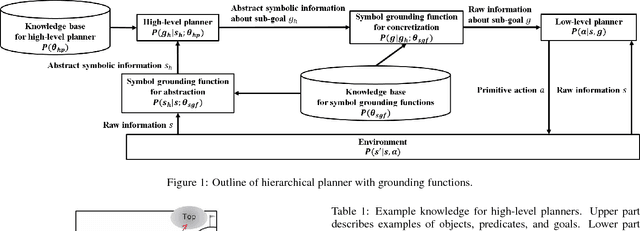
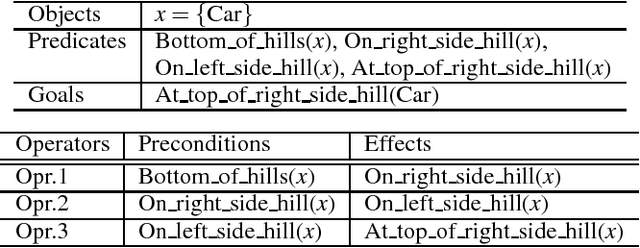
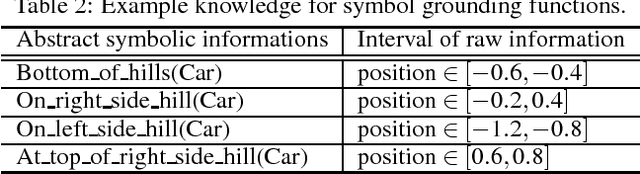
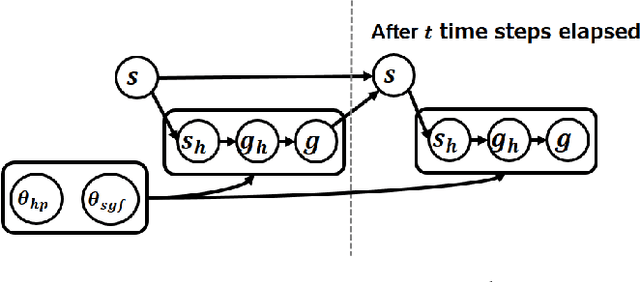
Hierarchical planners that produce interpretable and appropriate plans are desired, especially in its application to supporting human decision making. In the typical development of the hierarchical planners, higher-level planners and symbol grounding functions are manually created, and this manual creation requires much human effort. In this paper, we propose a framework that can automatically refine symbol grounding functions and a high-level planner to reduce human effort for designing these modules. In our framework, symbol grounding and high-level planning, which are based on manually-designed knowledge bases, are modeled with semi-Markov decision processes. A policy gradient method is then applied to refine the modules, in which two terms for updating the modules are considered. The first term, called a reinforcement term, contributes to updating the modules to improve the overall performance of a hierarchical planner to produce appropriate plans. The second term, called a penalty term, contributes to keeping refined modules consistent with the manually-designed original modules. Namely, it keeps the planner, which uses the refined modules, producing interpretable plans. We perform preliminary experiments to solve the Mountain car problem, and its results show that a manually-designed high-level planner and symbol grounding function were successfully refined by our framework.