 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefer-it-in-RGBD: A Bottom-up Approach for 3D Visual Grounding in RGBD Images
Paper and Code


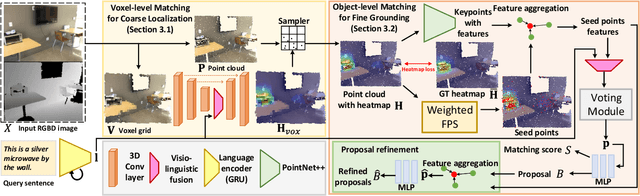
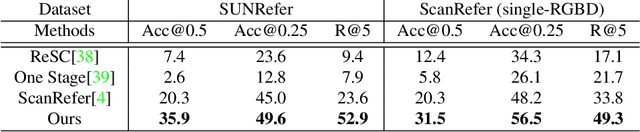
Grounding referring expressions in RGBD image has been an emerging field. We present a novel task of 3D visual grounding in single-view RGBD image where the referred objects are often only partially scanned due to occlusion. In contrast to previous works that directly generate object proposals for grounding in the 3D scenes, we propose a bottom-up approach to gradually aggregate context-aware information, effectively addressing the challenge posed by the partial geometry. Our approach first fuses the language and the visual features at the bottom level to generate a heatmap that coarsely localizes the relevant regions in the RGBD image. Then our approach conducts an adaptive feature learning based on the heatmap and performs the object-level matching with another visio-linguistic fusion to finally ground the referred object. We evaluate the proposed method by comparing to the state-of-the-art methods on both the RGBD images extracted from the ScanRefer dataset and our newly collected SUNRefer dataset. Experiments show that our method outperforms the previous methods by a large margin (by 11.2% and 15.6% Acc@0.5) on both datasets.