 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognizing Orientation Slip in Human Demonstrations
Paper and Code
Aug 10, 2021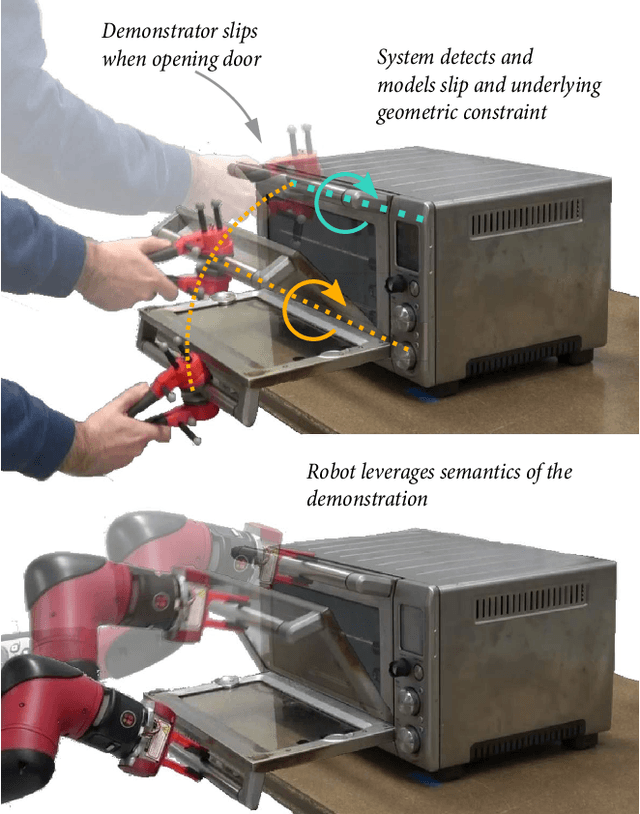

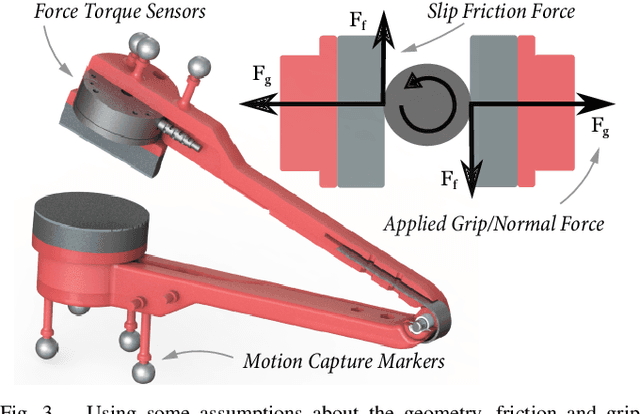
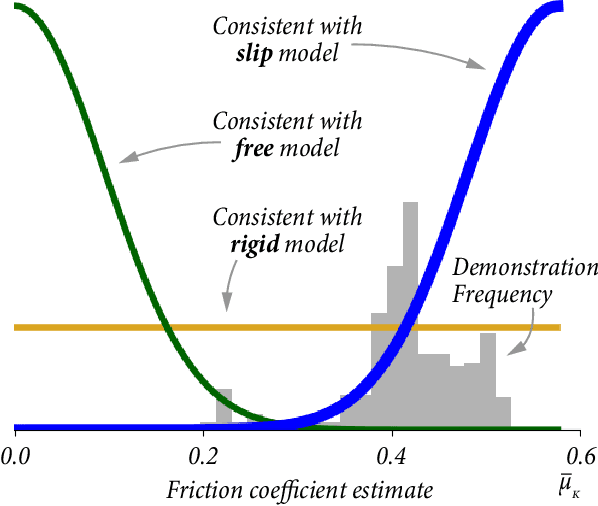
Manipulations of a constrained object often use a non-rigid grasp that allows the object to rotate relative to the end effector. This orientation slip strategy is often present in natural human demonstrations, yet it is generally overlooked in methods to identify constraints from such demonstrations. In this paper, we present a method to model and recognize prehensile orientation slip in human demonstrations of constrained interactions. Using only observations of an end effector, we can detect the type of constraint, parameters of the constraint, and orientation slip properties. Our method uses a novel hierarchical model selection method that is informed by multiple origins of physics-based evidence. A study with eight participants shows that orientation slip occurs in natural demonstrations and confirms that it can be detected by our method.