Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Cooking Robot System from Recipes Based on Food State Recognition Using Foundation Models and PDDL
Paper and Code
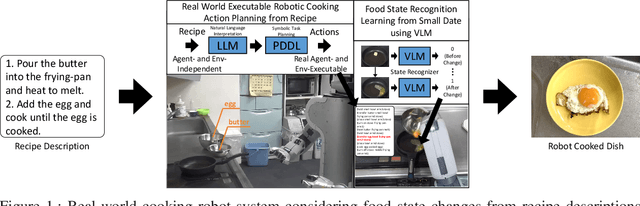

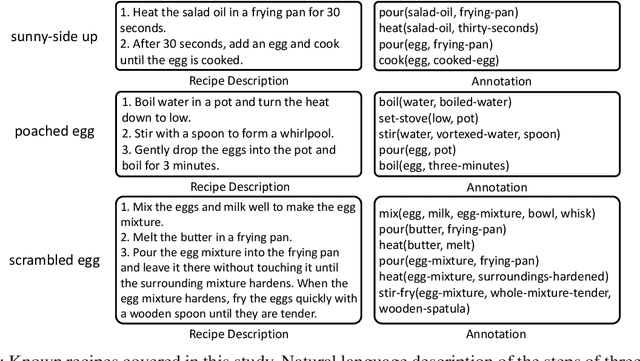

Although there is a growing demand for cooking behaviours as one of the expected tasks for robots, a series of cooking behaviours based on new recipe descriptions by robots in the real world has not yet been realised. In this study, we propose a robot system that integrates real-world executable robot cooking behaviour planning using the Large Language Model (LLM) and classical planning of PDDL descriptions, and food ingredient state recognition learning from a small number of data using the Vision-Language model (VLM). We succeeded in experiments in which PR2, a dual-armed wheeled robot, performed cooking from arranged new recipes in a real-world environment, and confirmed the effectiveness of the proposed system.
* Accepted at Advanced Robotics, website -
https://kanazawanaoaki.github.io/cook-from-recipe-pddl/
View paper on