 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Surgical Instrument Segmentation in Video Using Point Tracking and Segment Anything
Paper and Code
Mar 12, 2024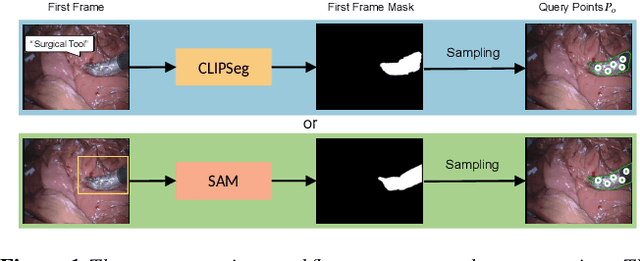
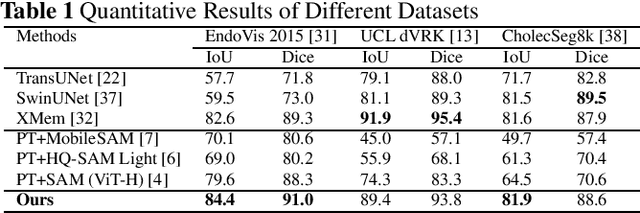
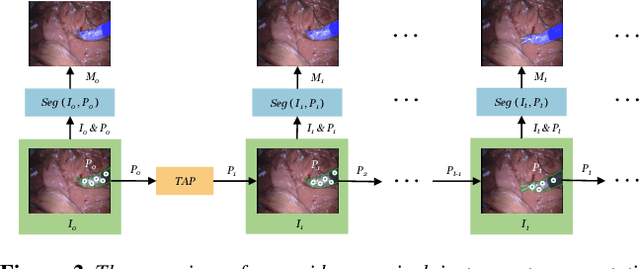
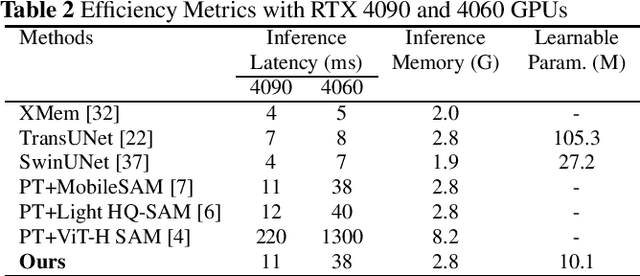
The Segment Anything Model (SAM) is a powerful vision foundation model that is revolutionizing the traditional paradigm of segmentation. Despite this, a reliance on prompting each frame and large computational cost limit its usage in robotically assisted surgery. Applications, such as augmented reality guidance, require little user intervention along with efficient inference to be usable clinically. In this study, we address these limitations by adopting lightweight SAM variants to meet the speed requirement and employing fine-tuning techniques to enhance their generalization in surgical scenes. Recent advancements in Tracking Any Point (TAP) have shown promising results in both accuracy and efficiency, particularly when points are occluded or leave the field of view. Inspired by this progress, we present a novel framework that combines an online point tracker with a lightweight SAM model that is fine-tuned for surgical instrument segmentation. Sparse points within the region of interest are tracked and used to prompt SAM throughout the video sequence, providing temporal consistency. The quantitative results surpass the state-of-the-art semi-supervised video object segmentation method on the EndoVis 2015 dataset, with an over 25 FPS inference speed running on a single GeForce RTX 4060 GPU.