 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Registration and Reconstruction with Cylindrical LiDAR Images
Paper and Code
Dec 06, 2021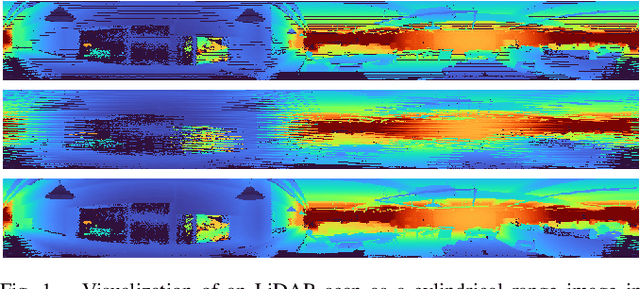
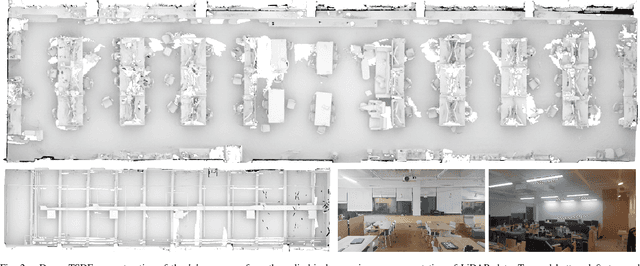
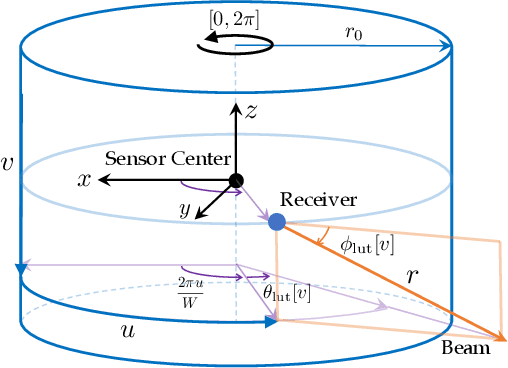
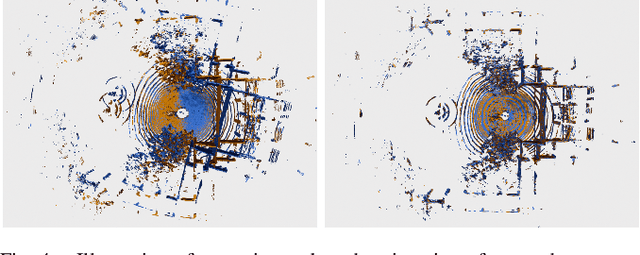
Spinning LiDAR data are prevalent for 3D perception tasks, yet its cylindrical image form is less studied. Conventional approaches regard scans as point clouds, and they either rely on expensive Euclidean 3D nearest neighbor search for data association or depend on projected range images for further processing. We revisit the LiDAR scan formation and present a cylindrical range image representation for data from raw scans, equipped with an efficient calibrated spherical projective model. With our formulation, we 1) collect a large dataset of LiDAR data consisting of both indoor and outdoor sequences accompanied with pseudo-ground truth poses; 2) evaluate the projective and conventional registration approaches on the sequences with both synthetic and real-world transformations; 3) transfer state-of-the-art RGB-D algorithms to LiDAR that runs up to 180 Hz for registration and 150 Hz for dense reconstruction. The dataset and tools will be released.